Function library, Irda positioning – Lenze LDECBBF1xxxxxxHx User Manual
Page 67
Function library
IrDA positioning
l
67
LDEDS−CCU210B EN 4.0
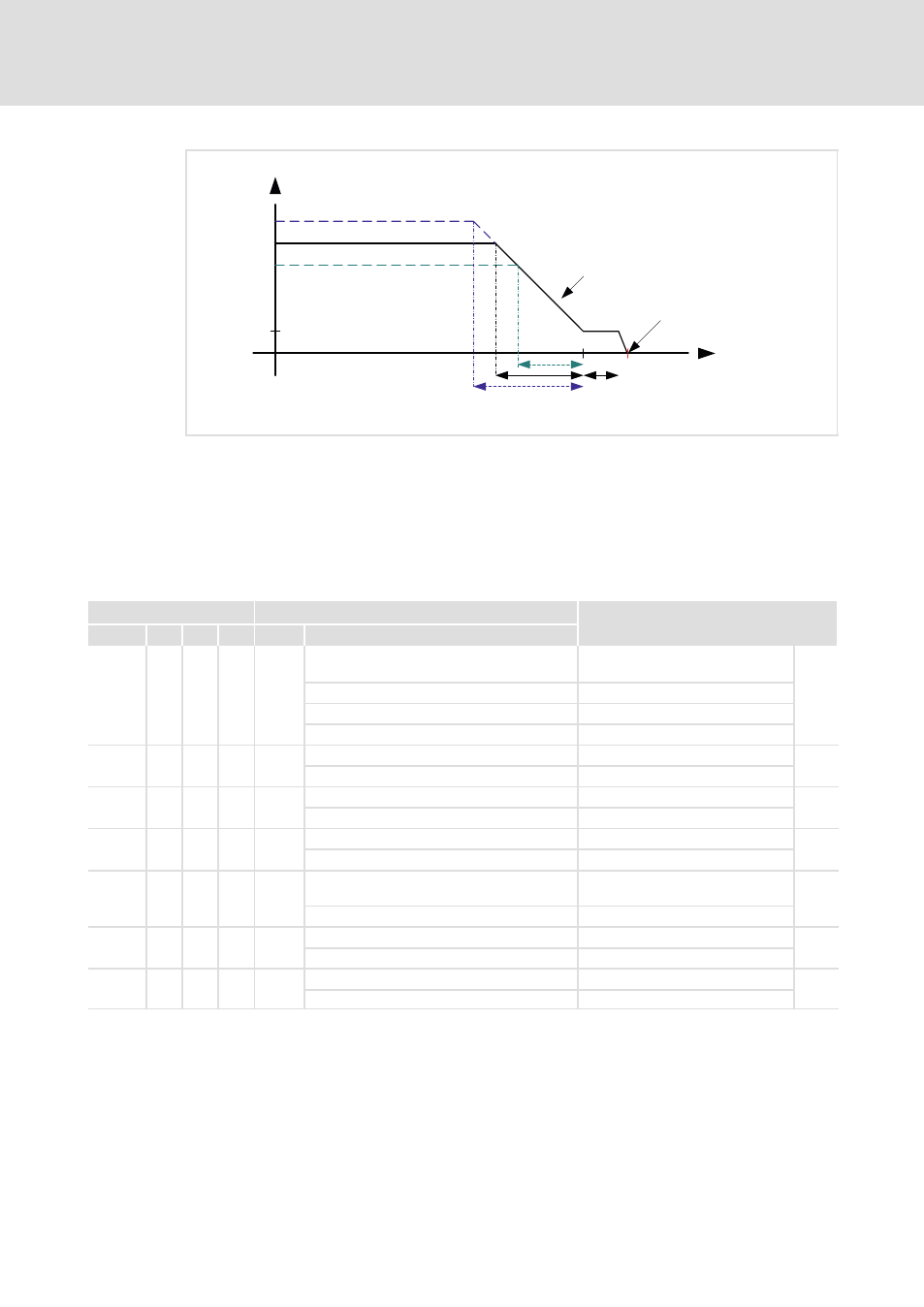
Approach path
(parameter)
Approach speed
(parameter)
Deceleration ramp
(parameter)
Braking distance
(calculated)
Travelling
speed
Position 0
(selection)
s
v
IRDS_005
ƒ
Via IrDA, the vehicle control system reports to the infrared data station that
positioning has been carried out successfully (position reached and drive stopped),
and the data station indicates this to the system control as fieldbus status bit.
ƒ
Exiting the position and thus the deactivation of the positioning function is
triggered by resetting the fieldbus control bit.
Codes for parameter setting
Code
Possible settings
Description
No.
ñò
< Byte Lenze
Selection
C0131
RW
EXT
4
0
Configuration of positioning error
monitoring
^ 66
0
Off
1
Error
2
Warning
C0491
RW
EXT
2
150
IrDA positioning approach path
^ 66
0
{mm}
2000
C0492
RW
EXT
4
5.0
IrDA positioning approach speed
^ 66
1
{Hz}
50.0
C0493
RW
EXT
1
50
IrDA positioning deceleration time
^ 66
1
{Hz/s}
255
C0495
RW
EXT
2
3
IrDA positioning braking distance
correction
^ 66
1
{mm}
100
C0496
RW
EXT
2
3
IrDA positioning position window
^ 66
1
{mm}
100
C0612
R
2
Status of IrDA position value [mm]
^ 66
0
{mm}
32768