10 monitoring, 1 interruption of ethercat communication, Monitoring – Lenze E94AYCET User Manual
Page 81
Lenze · E94AYCET communication module (EtherCAT®) · Communication Manual · DMS 9.0 EN · 02/2014 · TD17
81
10
Monitoring
10.1
Interruption of EtherCAT communication
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10
Monitoring
10.1
Interruption of EtherCAT communication
An interruption of the EtherCAT communication in the "Operational" state, e.g. due to cable break
of failure of the EtherCAT master, is detected by the slave.
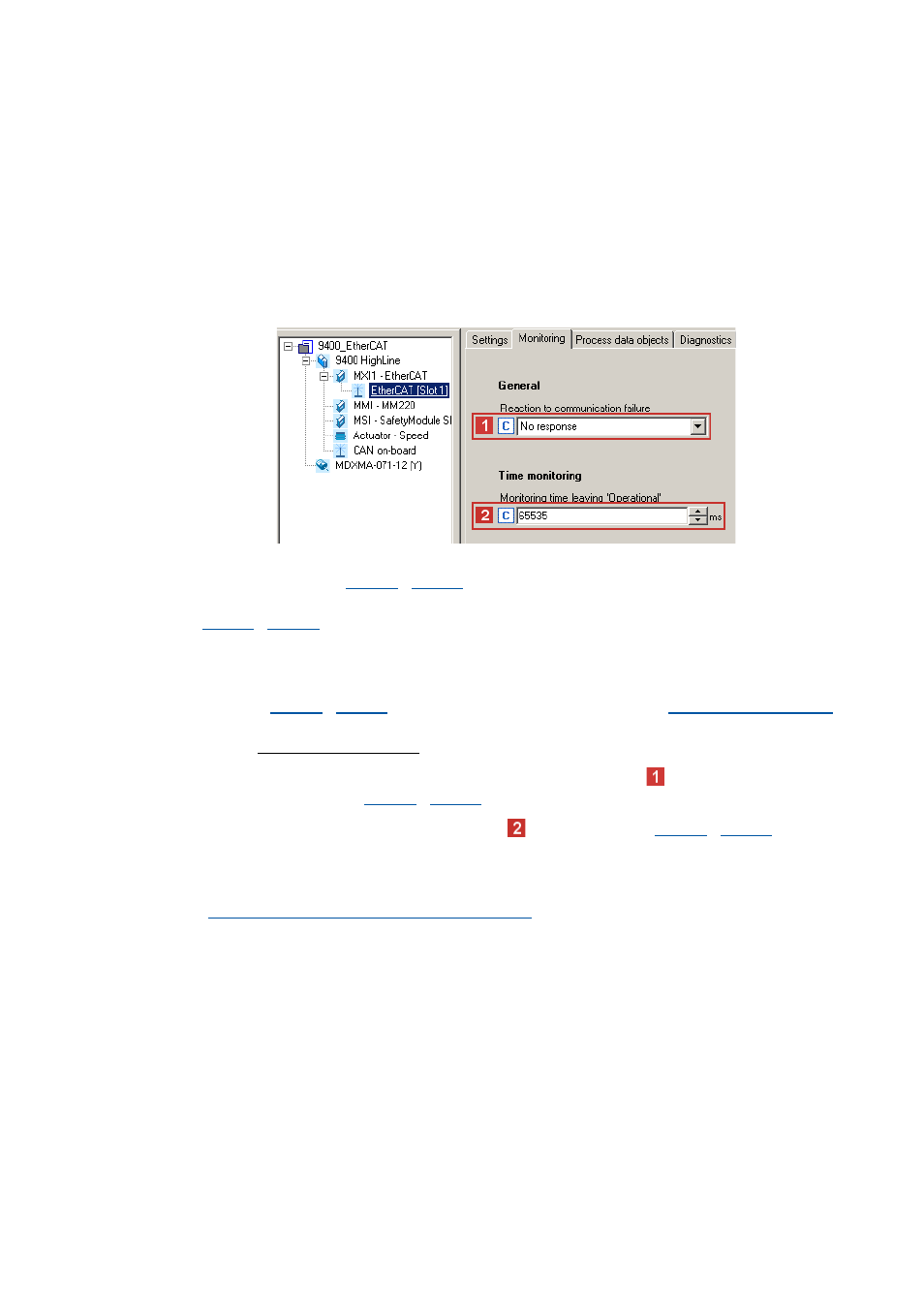
The response to an interrupted communication is triggered by settings in the Monitoring tab:
• During initialisation of the EtherCAT communication, the PDO watchdog monitoring time
preset in the master (
/
) is transmitted to the slave.
If the slave does not receive any valid process data in the "Operational" state, the setting in
is taken as a basis for the process data.
• Value ’0’: The data sent last by the master are used.
• Value ’1’: PDOs are set to the value '0'.
After the watchdog monitoring time has elapsed, the slave changes to the "Safe-operational"
state (see
/
), and the green RUN LED is activated (see
There is no response in the slave.
• In order that a response is triggered in the slave, you have to set a
Reaction on
communication failure (
/
• The response is delayed if you set an internal
monitoring time (
/
) in
addition.
The monitoring time elapses as soon as the "Operational" state is exited. (See 1.).
After the monitoring time has elapsed, the response set is executed with the error message
"
EtherCAT: Quit 'Operational' state [0x00c88131]
.