IAI America ACON-PO User Manual
Page 78
68
5. Parameter Settings
z Default Acceleration/Deceleration Mode (No. 52 HSTP)
Parameter No.
Unit
Input range
Default
52
-
0 ~ 2
0
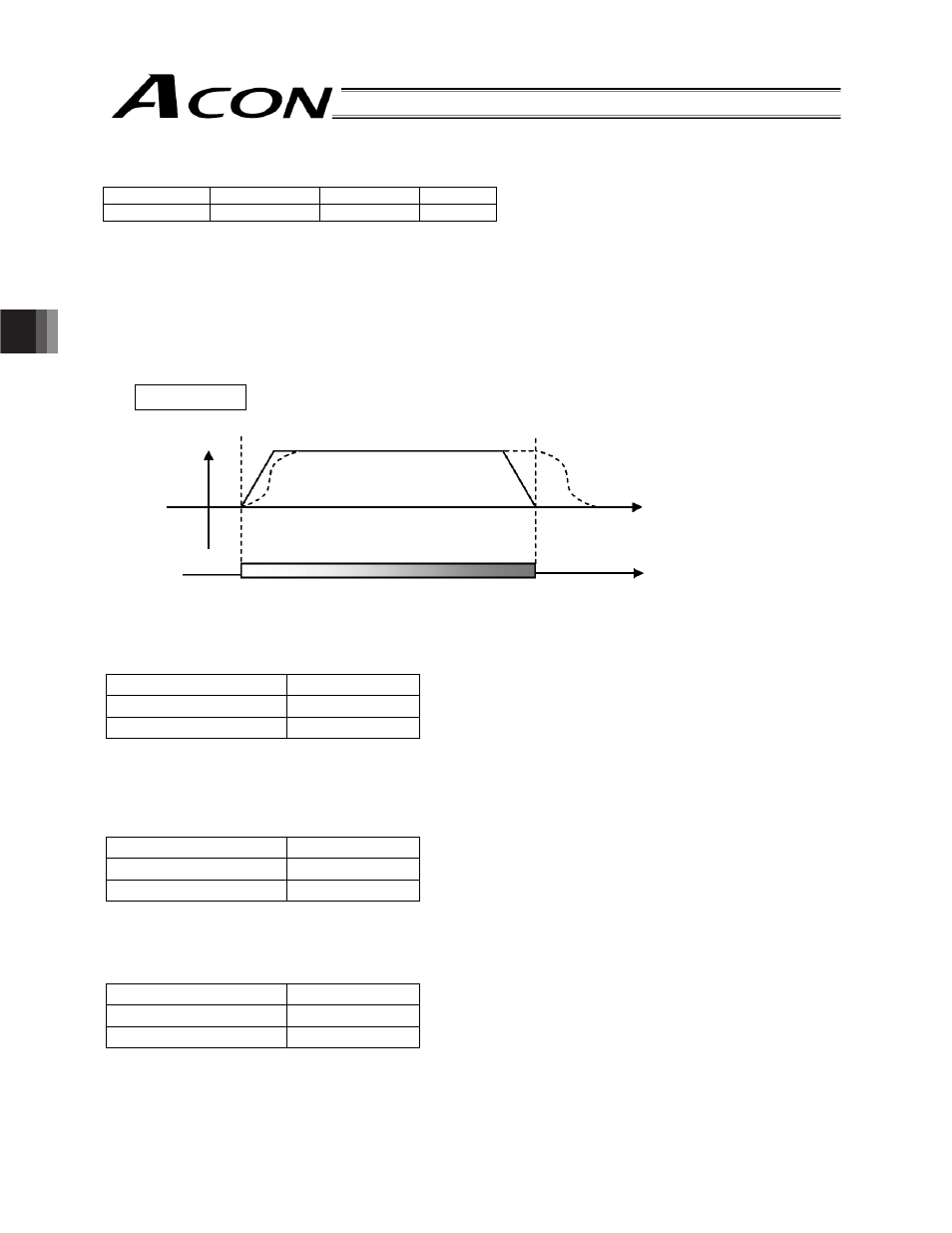
This parameter sets the acceleration/deceleration mode.
When “0” is set:
Trapezoid
When “2 is set:
Primary filter for position command
A primary delay is always reflected during movement. The travel corresponds to the specified pulses. Smooth
acceleration and deceleration can be implemented even when the host controller has no acceleration/deceleration
function or the number of command pulses changes suddenly.
The time constant is set in Parameter No. 55 (Filter time constant for position command).
If “0” is set, acceleration and deceleration do not reflect any primary delay.
z Homing Input (No. 40 HOME)
Whether to disable or enable the homing input signal is set in Parameter No. 40.
Setting
Enable (Use)
0
Disable (Do not use)
1
The factory setting is “0” [Enable].
z Clear Deviation at Servo Off/Alarm Stop (No. 58 SDCR)
Whether to disable or enable the deviation clear function when the servo is turned off or an alarm generates is set in
Parameter No. 58.
Setting
Disable (Do not clear)
0
Enable (Clear)
1
The factory setting is “1” [Enable].
z Deviation-counter Clear Input (No. 60 DCLR)
Whether to disable or enable the deviation-counter clear input is set in Parameter No. 60.
Setting
Enable (Use)
0
Disable (Do not use)
1
The factory setting is “0” [Enable].
Image diagram
Speed
Pulse train