Parameter settings, 1 parameter list – IAI America ACON-PO User Manual
Page 67
57
5. Parameter Settings
5.
Parameter Settings
5.1
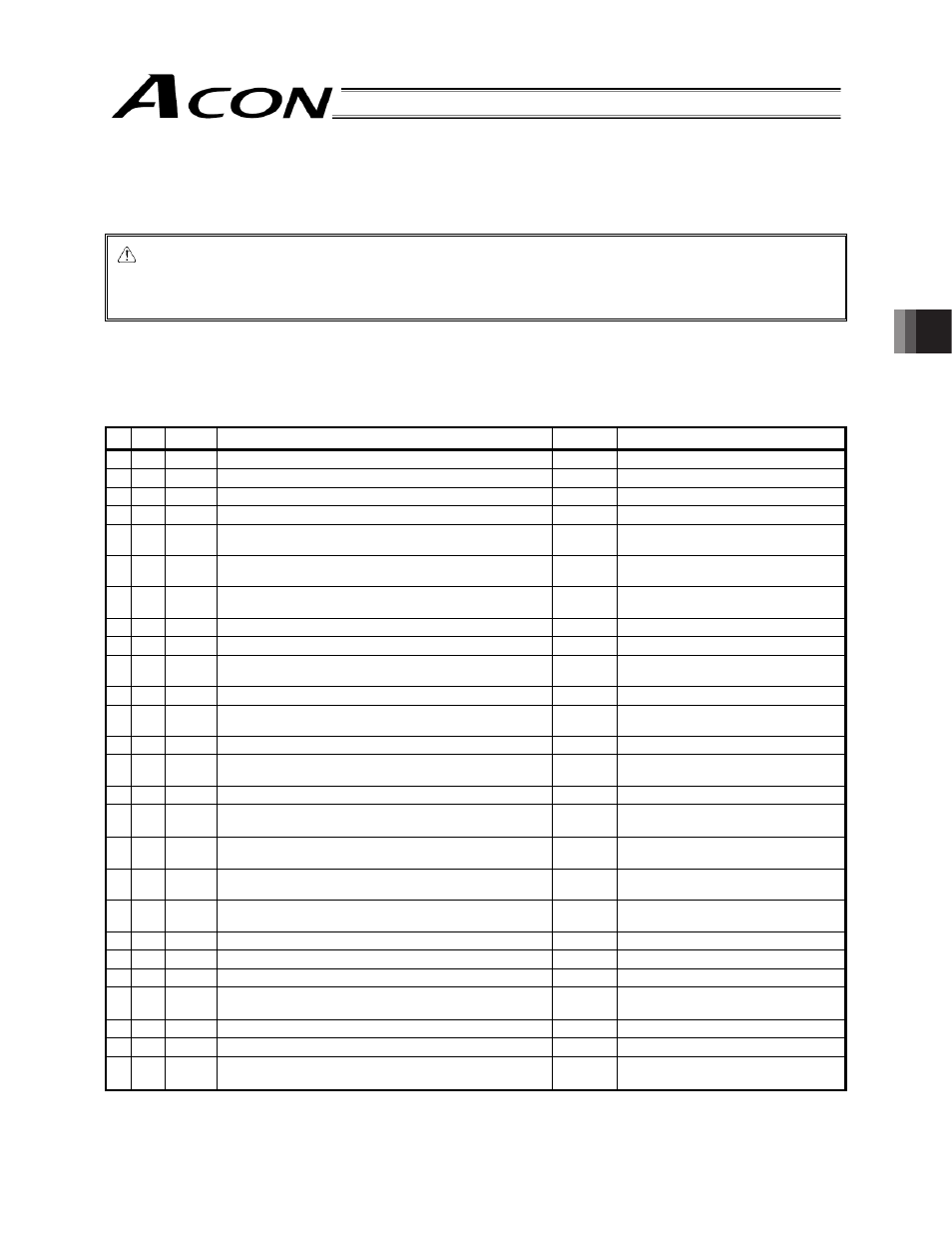
Parameter List
Caution:
This product uses a non-volatile memory (EEPROM) as the storage medium.
If the power is cut off while data is still being written, the data may not be written correctly.
Exercise due caution to prevent cutoff of power while rewriting parameters.
The parameters are classified into the following four types depending on their function:
Types:
a: Parameter relating to actuator stroke range
b: Parameter relating to actuator operating characteristics
c: Parameter relating to external interface
d: Servo gain adjustment
No. Type
Symbol
Name
Unit
Factory default
3
a
LIMM
Soft limit + side
mm
Effective length of the actuator
4
a
LIML
Soft limit – side
mm
Effective length of the actuator
5
a
ORG
Home direction [0: Reverse / 1: Forward]
-
(As specified at the time of order)
7
d
PLGO Servo gain number
-
6
9
b
ACMD Default acceleration/deceleration
G
Set individually in accordance with
the actuator characteristics.
10
b
INP
Default positioning band (in-position)
mm
Set individually in accordance with
the actuator characteristics.
13
b
ODPW Current-limiting value during home return
%
Set individually in accordance with
the actuator characteristics.
16
c
BRSL SIO communication speed
bps
38400
17
c
RTIM
Minimum delay time for slave transmitter activation
msec
5
18
c
LS
Home sensor input polarity
[0: None / 1: Contact a / 2: Contact b]
-
0
21
c
SON
Servo-on input [0: Enable / 1: Disable]
0
22
a
OFST Home offset
mm
Set individually in accordance with
the actuator characteristics.
25
c
IOPN
PIO pattern selection
-
0 [Standard type]
28
b
PHSP
Default direction of excited phase signal detection
[0: Reverse / 1: Forward]
0
29
b
PHSP Excited phase signal detection time
msec
128
30
b
PHSP
Pole sensing type [0: Current suppression /
1: Distance suppression]
-
1
31
d
VLPG Speed loop proportional gain
-
Set individually in accordance with
the actuator characteristics.
32
d
VLPT
Speed loop integral gain
-
Set individually in accordance with
the actuator characteristics.
33
d
TRQF Torque filter time constant
-
Set individually in accordance with
the actuator characteristics.
35
b
SAFV Safety speed
mm/sec 100
40
c
HOME Homing input [0: Enable / 1: Disable]
-
0 [Enable]
42
b
ENBL Enable function [0: Enable / 1: Disable]
-
1 [Disable]
43
b
HMC
Home check sensor input polarity [1: Contact a /
2: Contact b]
-
Set individually in accordance with
the actuator characteristics.
45
c
SIVM
Silent interval multiplication factor
-
0 [Multiplication factor disabled]
52
c
HSTP Default acceleration/deceleration mode
-
0 [Trapezoid]
54
d
CLPF Current control band number
-
Set individually in accordance with
the actuator characteristics.