Ii. entering the parameters for the pid function – Burkert Type 8619 User Manual
Page 61
59
Adjustmentandcommissioning
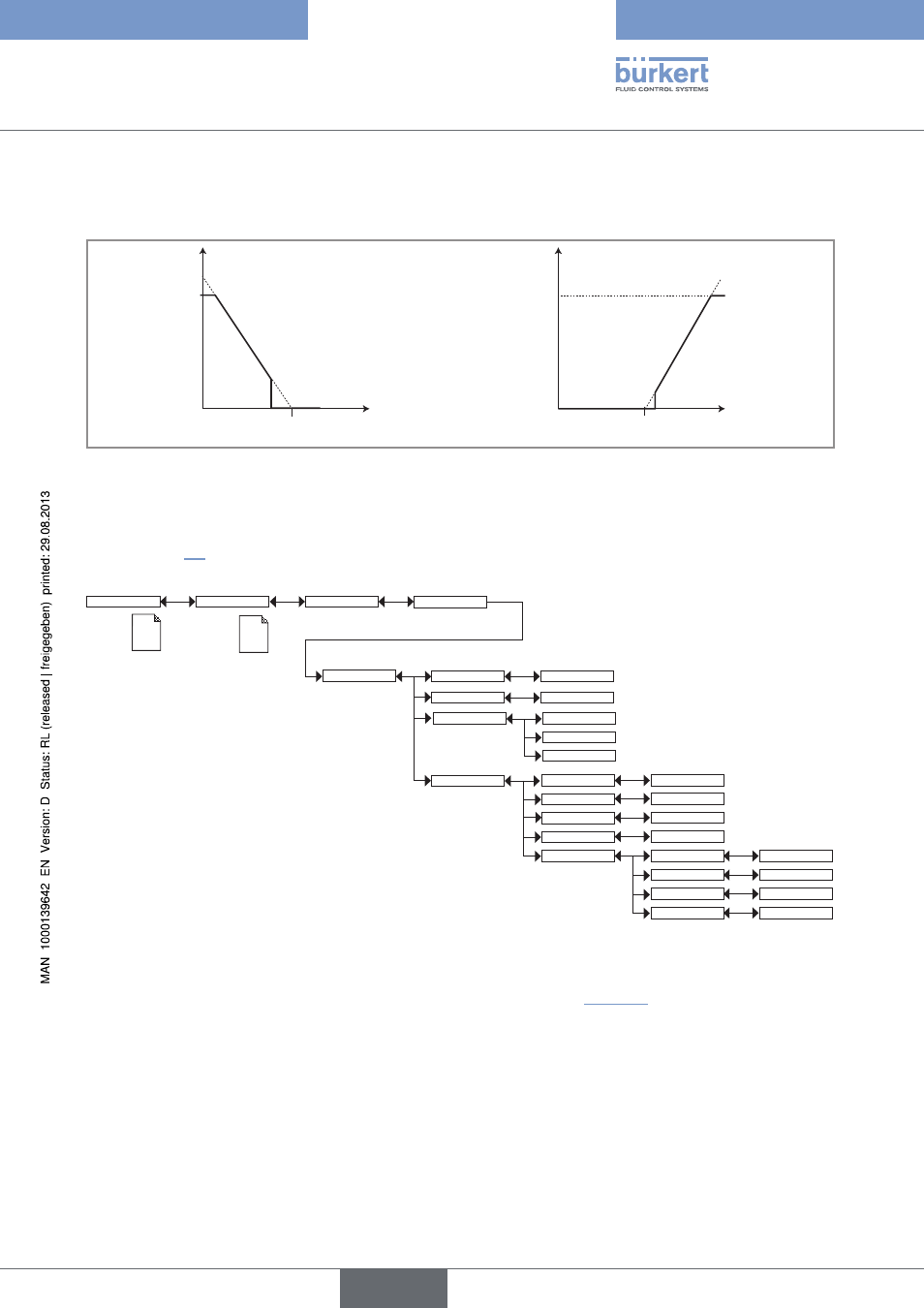
INVERSION: Used to invert (choose "ON") or not (choose "OFF") the operating direction of the output
depending on the indication of the difference between setpoint (SP) and measurement (PV). This function is used
in particular in an acid-base regulation.
0%
100%
Fx: (CMD)
Process measurement
Setpoint (SP)
non-inverted mode
0%
100%
Process
measurement
Setpoint (SP)
inverted mode
Fx: (CMD)
Figure 48 :
Operating direction of the output, non-inverted or inverted
ii. enterinG the pArAmeters for the piD function
Refer to chap. 8.9 to access Parameters menu.
PV filter:
None
Fast
Slow
Parameters
Sample time:
Channel 1/2
ENTERING
Parameters
Functions
F1...F6:
PID
This is
when the
device is be-
ing parame-
tered............
....................
This is
when the
device is be-
ing parame-
tered............
....................
Deadband:
Kp:
Tn:
Tv:
ENTERING
ENTERING
ENTERING
ENTERING
Lim-:
X0:
Lim+:
State OFF:
ENTERING
ENTERING
ENTERING
ENTERING
Advanced
SP Value
ENTERING
SAMPLE TIME: Define the sampling time (between 0.1 and 60 s).
SP VALUE: Enter the setpoint value.
PV FILTER: Choose the level of damping of the chosen process value. See Figure 29.
DEADBAND: Define the percentage, from 0 to 100%, of the deadband around the setpoint value.
KP: Define the proportional gain applied to the difference between the setpoint value and the measured value.
TN: This parameter represents the integral part of the PID module used to eliminate the static error between the
measurement and the setpoint. Enter a value of between 0.1 and 9999 seconds (default value: 9999 s).
TV: This parameter represents the drift part of the PID module used to react quickly to variations in measurement
or setpoint and anticipate variations on the controller. Use this variable on slow processes. Enter a value of
between 0.0 and 9999 seconds (default value: 0.0 s).
Type 8619
english