Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 373
10 Troubleshooting
10-26
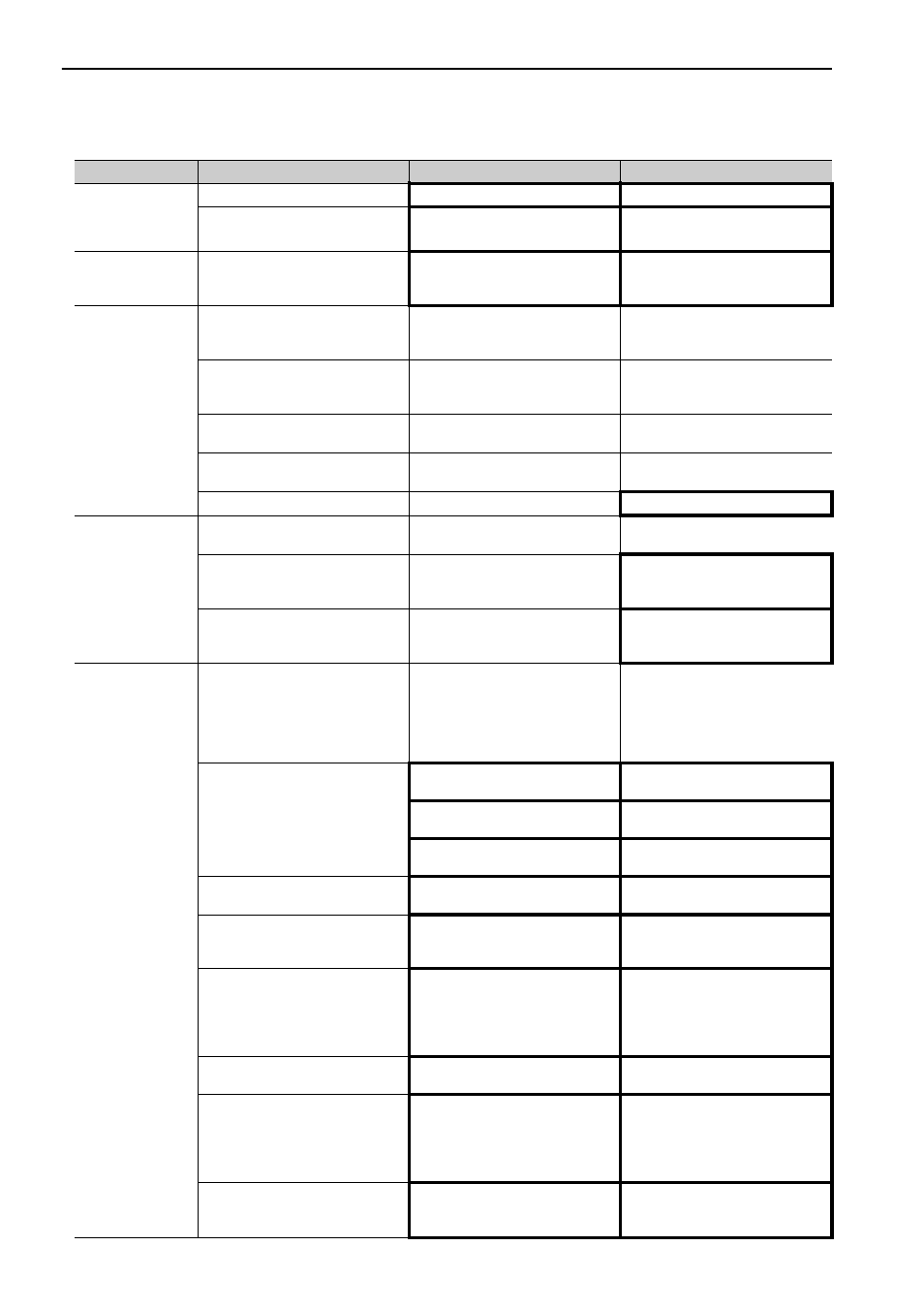
Servomotor
Moves Instanta-
neously, and then
Stops
Servomotor wiring is incorrect.
Check the wiring.
Correct the wiring.
Encoder wiring is incorrect.
Check the wiring.
Correct the wiring.
Servomotor
Speed Unstable
Wiring connection to servomotor is
defective.
Check connections of power line
(phases U, V, and W) and encoder
connectors.
Tighten any loose terminals or con-
nectors and correct the wiring.
Servomotor Ro-
tates Without Ref-
erence Input
Speed control: Speed reference
input is incorrect.
Check V-REF and SG to confirm if
the control method and the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Torque control: Torque reference
input is incorrect.
Check V-REF and SG to confirm if
the control method and the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Speed reference offset is incorrect.
The SERVOPACK offset is
adjusted incorrectly.
Adjust the SERVOPACK offset.
Position control: Reference pulse
input is incorrect.
Check the reference pulse form
(Pn200.0) and sign + pulse signal.
Correct the control method selec-
tion parameter, and the input signal.
A SERVOPACK fault occurred.
−
Replace the SERVOPACK.
Dynamic Brake
Does Not Operate
Improper Pn001.0 setting
Check the setting for parameter
Pn001.0.
Correct the setting for parameter
Pn001.0.
DB resistor disconnected
Check if excessive moment of iner-
tia, motor overspeed, or DB fre-
quently activated occurred.
Replace the SERVOPACK, and
reduce the load.
DB drive circuit fault
−
There is a defective component in
the DB circuit. Replace the SER-
VOPACK.
Abnormal Noise
from Servomotor
The servomotor largely vibrated
during execution of tuning-less
function.
Check the motor speed waveform.
Reduce the load so that the moment
of inertia ratio becomes within the
allowable value, or increase the
load level or lower the tuning level
for the tuning-less levels setting
(Fn200).
Mounting is not secured.
Check if there are any loose mount-
ing screws.
Tighten the mounting screws.
Check if there is misalignment of
couplings.
Align the couplings.
Check if there are unbalanced cou-
plings.
Balance the couplings.
Bearings are defective.
Check for noise and vibration
around the bearings.
Replace the servomotor.
Vibration source at the driven
machine.
Check for any foreign matter, dam-
age, or deformations on the machin-
ery's movable parts.
Contact the machine manufacturer.
Noise interference due to incorrect
I/O signal cable specifications.
The I/O signal cable must be tinned
annealed copper shielded twisted-
pair or screened unshielded twisted-
pair cable with a core of 0.12 mm
2
min.
Use the specified I/O signal cable.
Noise interference due to length of
I/O signal cable.
Check the length of the I/O signal
cable.
The I/O signal cable length must be
no more than 3 m.
Noise interference due to incorrect
cable specifications of encoder
cable.
The encoder cable must be tinned
annealed copper shielded twisted-
pair or screened unshielded twisted-
pair cable with a core of 0.12 mm
2
min.
Use the specified encoder cable.
Noise interference due to length of
encoder cable.
Check the length of the encoder
cable.
The encoder cable must be no more
than 50 m.
(cont’d)
Problem
Probable Cause
Investigative Actions
Corrective Actions