3 parameter settings for fully-closed loop control – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 338
9 Fully-closed Loop Control
9-12
9.3 Parameter Settings for Fully-closed Loop Control
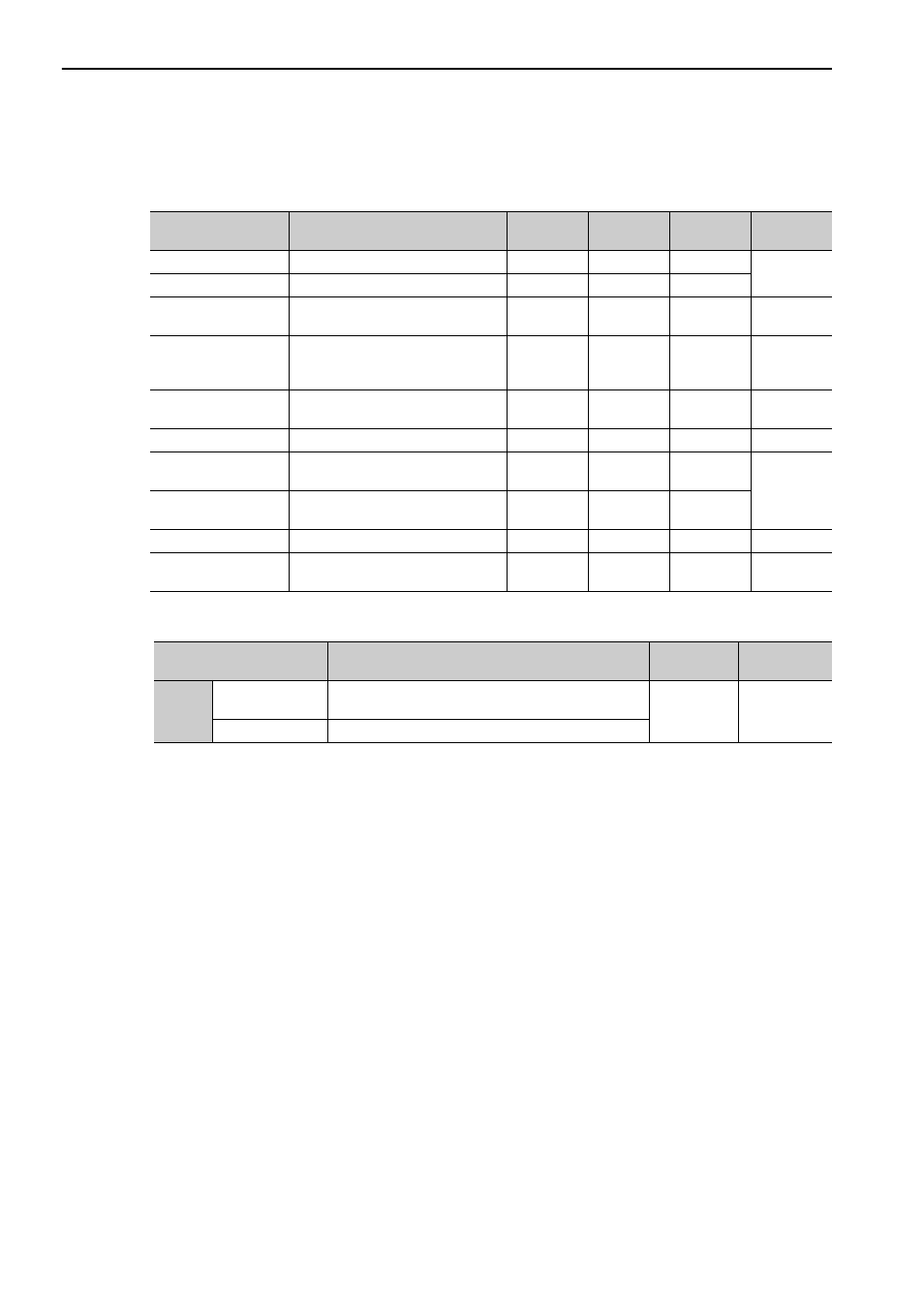
This section describes the parameter settings for fully-closed loop control.
Note: When using an external absolute encoder, this external encoder works as an absolute encoder even if Pn002.2 is set
to 1.
Set Parameters
Setting Contents
Position
Control
Speed
Control
Torque
Control
Reference
Pn000.0
Motor rotation direction
9.3.1
Pn002.3
External encoder usage method
Pn20A
Number of pitches for the external
encoder
9.3.2
Pn281
Number of encoder output pulses
(PAO, PBO, and PCO) from the
SERVOPACK
9.3.3
−
External absolute encoder data
reception sequence
9.3.4
Pn20E, Pn210
Electronic gear ratio
−
−
9.3.5
Pn51B
Excessive error level between servo-
motor and load positions
−
−
9.3.6
Pn52A
Multiplier per one fully-closed rota-
tion
−
−
Pn006/Pn007
Analog monitor signal
9.3.7
Pn22A
Speed feedback method during fully-
closed loop control
−
−
9.3.8
Parameter
Meaning
When
Enabled
Classification
Pn002
n. 0
[Factory setting]
Uses the absolute encoder as an absolute encoder.
After restart
Setup
n. 1
Uses the absolute encoder as an incremental encoder.