3) restrictions when using an encoder – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors - Analog Voltage and Pulse Train Reference User Manual
Page 234
6.4 Advanced Autotuning by Reference (Fn202)
6-31
6
Adjustm
e
nts
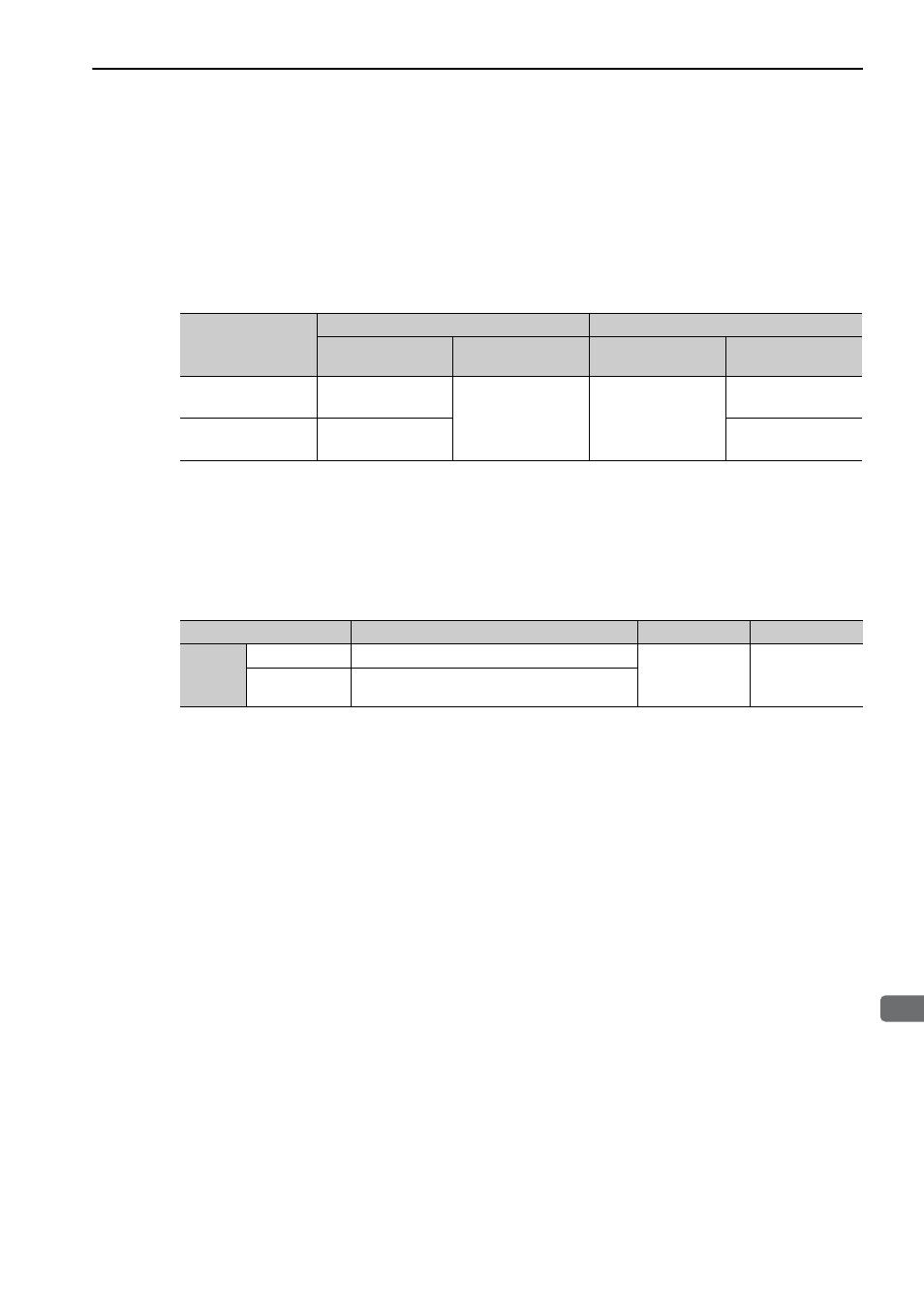
(3) Restrictions When Using an Encoder
With this function, the following restrictions are applied in accordance with the version number of the SER-
VOPACK software and the encoder being used.
The applicable servomotor depends on the type of encoder used.
• 13-bit encoder: SGMJV-
A
• 20-bit or 17-bit encoder: SGM V-
D
, SGM V-
3
SGMPS-
C
, SGMPS-
2
∗1. The software version number of your SERVOPACK can be checked with Fn012.
∗2. If any mode other than Mode 1 is selected, tuning will fail and result in an error.
∗3. Model following control type is not used.
∗4. Position errors may result in overshooting when positioning. The positioning time may be extended if the positioning
completed width (Pn522) is set to a small value.
∗5. Model following control type 2 can suppress overshooting resulting from position errors better than Type 1. If com-
patibility with SERVOPACK version 0007 or earlier is required, use model following control type 1 (Pn14F.0 = 0).
The control related switch (Pn14F) was added to SERVOPACK software version 0008 or later.
Software Version
*1
13-bit Encoder
20-bit or 17-bit Encoder
Mode
Model Following
Control Type
Mode
Model Following
Control Type
Version 0007 or ear-
lier
Only Mode 1 can be
selected.
*2
–
*3
No restrictions
Type 1
*4
Version 0008 or lat-
er
Only Mode 1 can be
selected.
Type 1 or 2 [Factory
setting]
*5
Parameter
Function
When Enabled
Classification
Pn14F
n.
0
Model following control type 1
After restart
Tuning
n.
1
[Factory setting] Model following control type 2