Input /cl cn1-*1 – Yaskawa Sigma Mini User Manual
Page 51
2.1Setting Parameters According to Machine Characteristics
— 2-7 —
Output Signal for Torque Restriction Function
The torque restriction function
outputs the signal shown on
the right.
•
/CLT
•
Status indication mode bit data
•
Monitor mode Un-05 bit 4
Parameter Setting:
Cn-2C = 4
Examples of Use:
D
Forced stopping
D
Holding workpiece by robot
Cn-18
CLMI
Forward/Reverse
External Torque Limit
Unit:
%
Setting
Range: 0 to
Maximum
Torque
Factory
Setting:
100
For Speed/Torque
Control and Position
Control
Sets a torque limit value when torque is to be restricted by external contact input.
This function is valid when bit 2 of memory switch Cn-02 is set to 0.
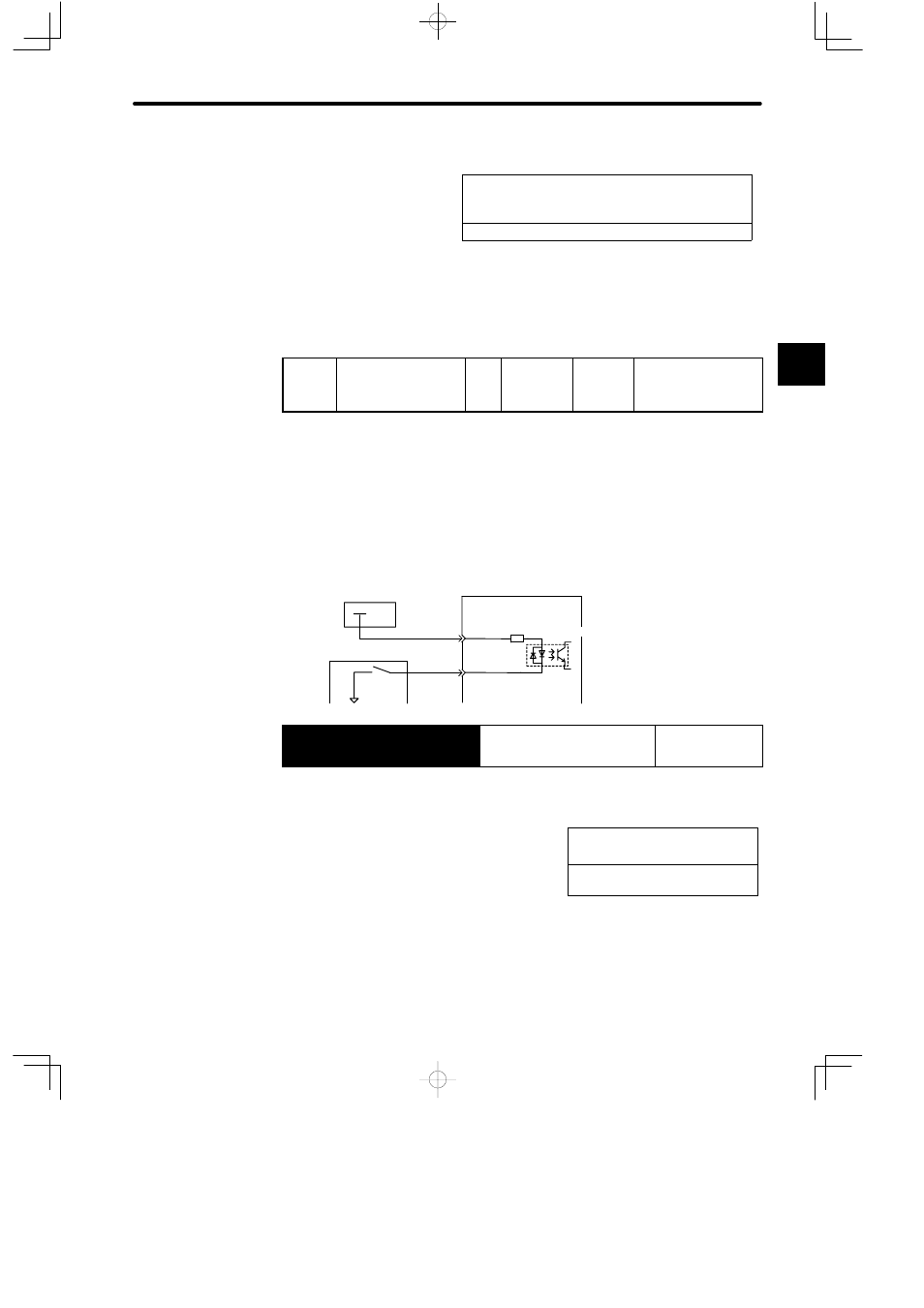
Using /CL Signal
This section describes how to use input signal /CL as torque limit input signals.
I/O power supply
Servopack
+24VIN
/CL
CN1-9
CN1-*1
Host controller
5mA
+ 24 V
Photocoupler
4.7kΩ
→ Input /CL CN1-*1
Forward/reverse External
Torque Limit Input
For Speed/Torque
Control and
Position Control
These signals are for forward and reverse exter-
nal torque (current) limit input.
This function is useful in forced stopping.
The signal shown on the right is output while
torque is being restricted.
2
Output Signal for Torque
Restriction Function
• /CLT
• Status indication mode bit data
• Monitor mode Un-05 bit 4
• Parameter Setting:
Cn-2C = 4