Yaskawa Sigma Mini User Manual
Page 183
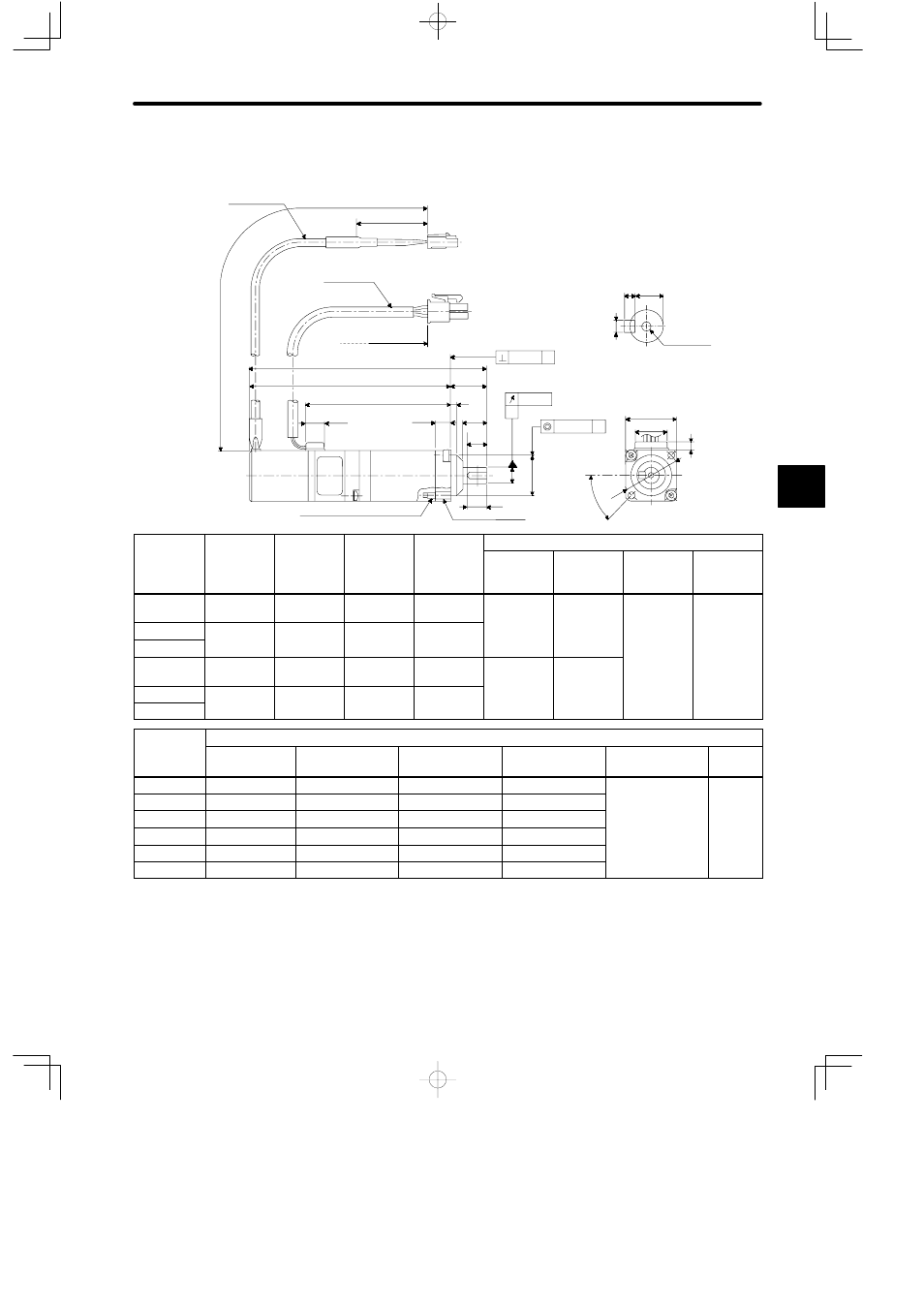
4.4Servo Drive Dimensional Drawings
— 4-33 —
Incremental Encoders (Model SGMM-AjC3Jj6)
• 10 W, 20 W
UL20276
L
L1
L2
12
(0.47)
7.5
(0.30)
9.5
(0.37)
A
0.04
A
A
0.06
0.05
φ
28
(φ
1.10)
45
°
j
25 (0.98)
4
16 (0.63)
6.2 (0.24)
Encoder Leads
AWG24,UL10095 or UL3266
Motor Leads
35 (1.38)
300 (11.81) ±30 (1.18)
300 (11.81)
±30 (1.18)
3 (0.12)
3
(0.12)
M3 tap screw,
depth: 4 (0.16)
18 (0.71)
(φ 0.0020)
(0.0016)
(0.0024)
3
(0.12)
2 × M3 tap screws, depth: 4 (0.16)
2 x φ3.4 (φ0.13) dia.
(A)
(B)
(A): φ8
0
−0.009
(φ0.197
−0.0001
−0.0005
)
(B): φ20
0
−0.013
(φ0.79
0
−0.83
)
Shaft end
(with flat seat)
(0.16)
Type
SGMM
L mm (in)
L1 mm (in) L2 mm (in)
Approx.
M
Motors
yp
SGMM-
( )
( )
( )
pp
Mass
(g)
Output W
(HP)
Torque
NSm
(lbSm)
Time
Rating
Rated
Speed
(min
−1
)
A1C3JA6
106.5
(4.19)
88.5 (3.48)
61 (2.4)
315
10 (0.013)
0.032
(0.007)
Continuous 3000
A1C3JB6
117 (4.61)
99 (3.9)
71.5 (2.81)
350
(0 00 )
A1C3JC6
(
)
(
)
(
)
A2C3JA6
116.5
(4.59)
98.5 (3.88)
71 (2.8)
370
20 (0.027)
0.064
(0.014)
A2C3JB6
127 (5)
109 (4.29)
81.5 (3.21)
405
(0 0 )
A2C3JC6
( )
(
)
(
)
Type
SGMM
Reduction Gears
yp
SGMM-
Gear Ratio
Torque
NSm (lbSm)
Rated Speed
(min
−1
)
Allowable Radial
Load N (lb)
Allowable Thrust
Load N (lb)
Lost
Motion
A1C3JA6
1/5
0.127 (0.029)
600
51.9 (11.67)
47.0 (10.57)
0.5
(d )
A1C3JB6
1/16
0.407 (0.092)
187.5
76.4 (17.19)
(
)
(deg)
A1C3JC6
1/25
0.636 (0.143)
120
89.2 (20.07)
A2C3JA6
1/5
0.255 (0.057) *
600
51.9 (11.67)
A2C3JB6
1/16
0.815 (0.183)
187.5
76.4 (17.19)
A2C3JC6
1/25
1.274 (0.287)
120
89.2 (20.07)
Note
1) The detector uses a 2048 P/R incremental encoder.
2) The instantaneous max. torque of the reduction gear with * is allowable max. torque of
the reduction gear. The value is not that as three times as the rated torque.
3) The keyway complies with JIS B 1301−1976 (precision). A straight key is supplied (type
with key only).
4