Stability, Dynares 8/16 stability, Input impedance – Measurement Computing DataShuttle User Manual
Page 54: Noise rejection, Dynares 8/16 noise rejection, Common mode range, Input protection
5-8 DynaRes - Technical Notes
11-13-01
DataShuttle and DynaRes
RTD Conditions – Same as General Conditions. It does not include the accuracy of the RTD sensor itself.
RTD Conditions includes linearization and signal conditioning errors. Resolution assumes 16-bit resolution
is in use. RTD measurements are on the 50 mV range.
Stability
Accuracy specifications in this chapter already reflect these temperature drift errors for temperatures from
20° through 40° C.:
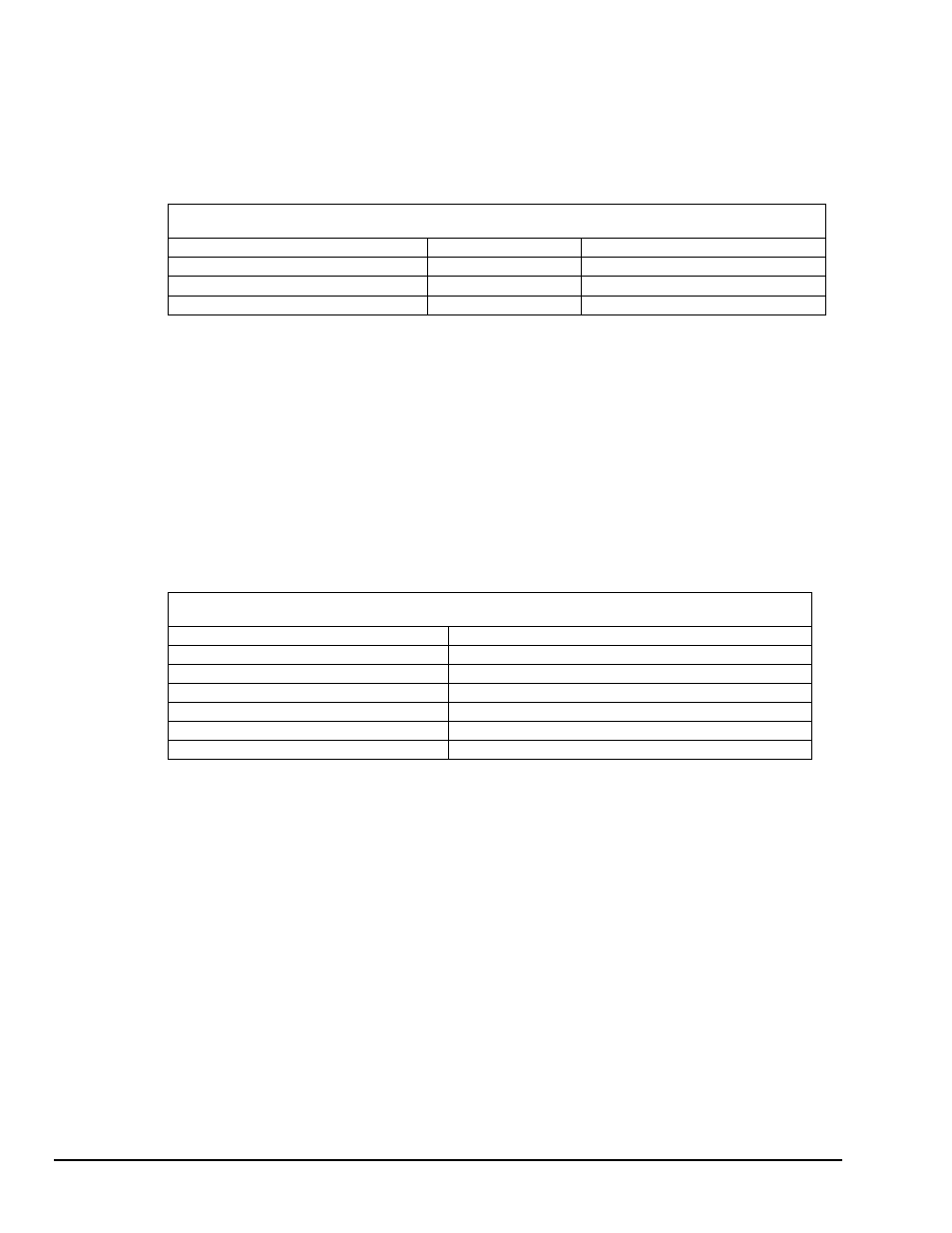
DynaRes 8/16 STABILITY
Range
% per °C.
% Over a Year
50 mV
± 0.001
± 0.02
± 25mV
± 0.001
± 0.02
all other voltage ranges
± 0.0025
± 0.03
I
n many applications, stability and noise can be more important than absolute accuracy. This is
“repeatability.” Calculate the repeatability of a reading by adding together the stability and noise for the
range you want.
Input Impedance
The DynaRes 8/16 Ultra has an input impedance of > 20 M
Ω.
Noise Rejection
Important: All noise measurements are in low noise mode.
CMRR – The Common Mode Rejection Ratio (CMRR) is >20 dB. Conditions for CMRR: DC to 400 Hz,
common mode input ± 7.0 Volts channel to ground. This specification applies even when one or more
nonmeasured channels exceeds the operating common mode range.
Dyna
Res 8/16 Noise Rejection
Range
Typical Internal Noise (RMS)
50 mV
0.5 µV
± 25 mV
0.5 µV
500 mV
2.5 µV
± 250 mV
2.5 µV
10 V
50 µV
± 5 V
50 µV
Common Mode Range
Operating, channel-to-ground – ±7 Volts
Nonoperating – 50 Volts continuous, 150 Volts for one second, nonrepetitive.
Input Protection
50 Volts continuous. 150 Volts for one second, nonrepetitive.