2 power-on values et1100, Power-on values et1100, Et1100 – BECKHOFF EtherCAT Registers Section II User Manual
Page 89
ESC specific registers (0x0E00:0x0EFF)
Slave Controller
– Register Description
II-77
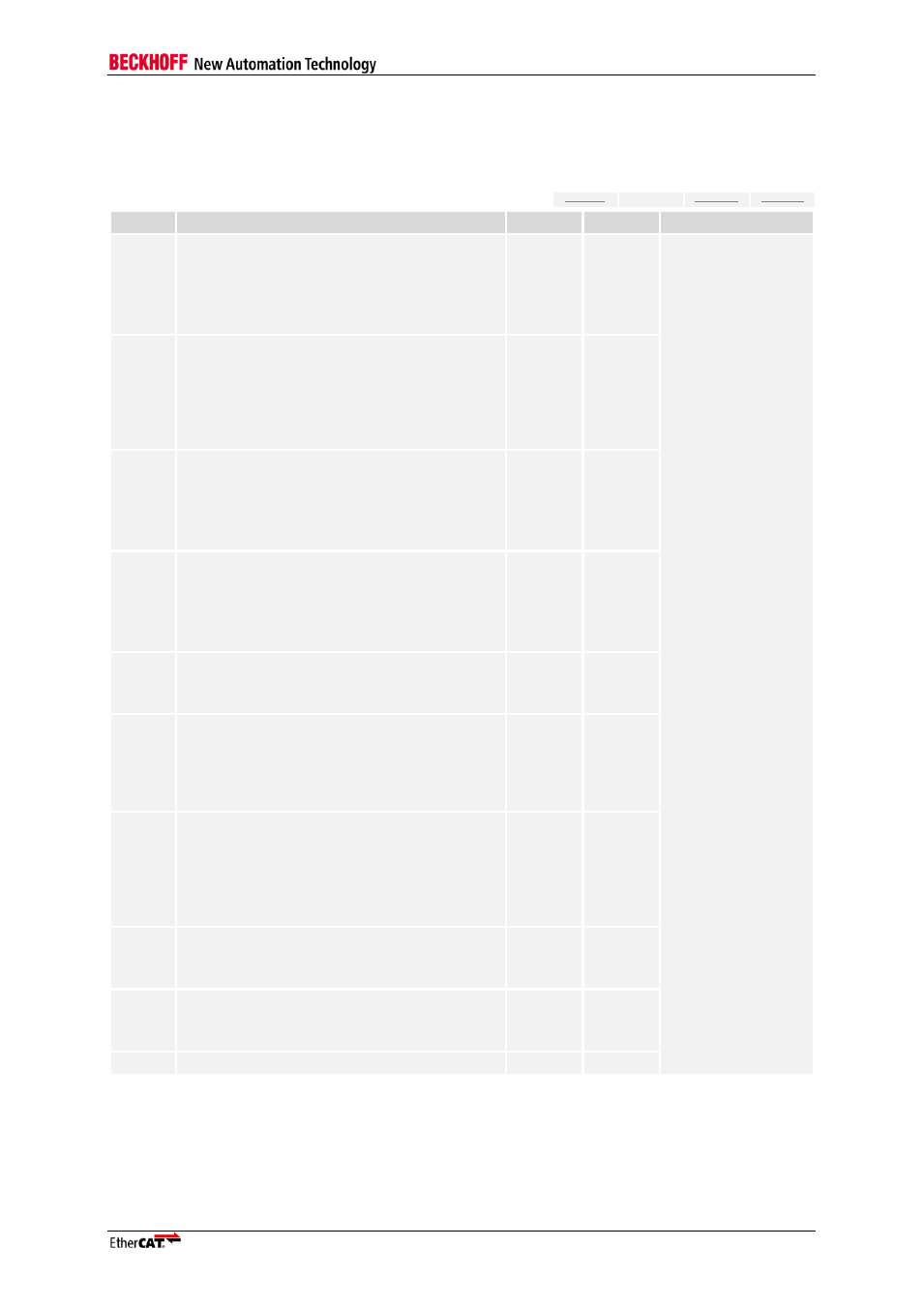
3.50.2 Power-On Values ET1100
Table 131: Register Power-On Values ET1100 (0x0E00:0x0E01)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
1:0
Port mode (P_MODE):
00: Logical ports 0 and 1 available
01: Logical ports 0, 1 and 2 available
10: Logical ports 0, 1 and 3 available
11: Logical ports 0, 1, 2 and 3 available
r/-
r/-
Depends on Hardware
configuration
5:2
Physical layer of available ports (P_CONF).
Bit 2
→ logical port 0, Bit 3 → logical port 1,
Bit 4
→ third logical port (2/3), Bit 5 → logical
port 3.
0:
EBUS
1:
MII
r/-
r/-
7:6
CPU clock output (CLK_MODE):
00: Off
– PDI[7] available as PDI port
01: PDI[7] = 25MHz
10: PDI[7] = 20MHz
11: PDI[7] = 10MHz
r/-
r/-
9:8
TX signal shift (C25_SHI):
00: MII TX signals shifted by 0°
01: MII TX signals shifted by 90°
10: MII TX signals shifted by 180°
11: MII TX signals shifted by 270°
r/-
r/-
10
CLK25 Output Enable (C25_ENA):
0:
Disabled
– PDI[31] available as PDI port
1:
Enabled
– PDI[31] = 25MHz (OSC)
r/-
r/-
11
Transparent Mode MII (Trans_Mode_Ena):
0:
Disabled
1:
Enabled
– ERR is input (0: TX signals
are tristated, 1: ESC is driving TX
signals)
r/-
r/-
12
Digital Control/State Move
(Ctrl_Status_Move):
0:
Control/Status signals are mapped to
PDI[39:32]
– if available
1:
Control/Status signals are remapped to
the highest available PDI Byte.
r/-
r/-
13
PHY Address Offset (PHYAD_OFF):
0:
No PHY address offset
1:
PHY address offset is 16
r/-
r/-
14
PHY Link Polarity (LINKPOL):
0:
LINK_MII is active low
1:
LINK_MII is active high
r/-
r/-
15
Reserved configuration bit
r/-
r/-