8/16bit synchronous microcontroller, 0x0150 – BECKHOFF EtherCAT Registers Section II User Manual
Page 44
PDI Configuration (0x0150:0x0153)
II-32
Slave Controller
– Register Description
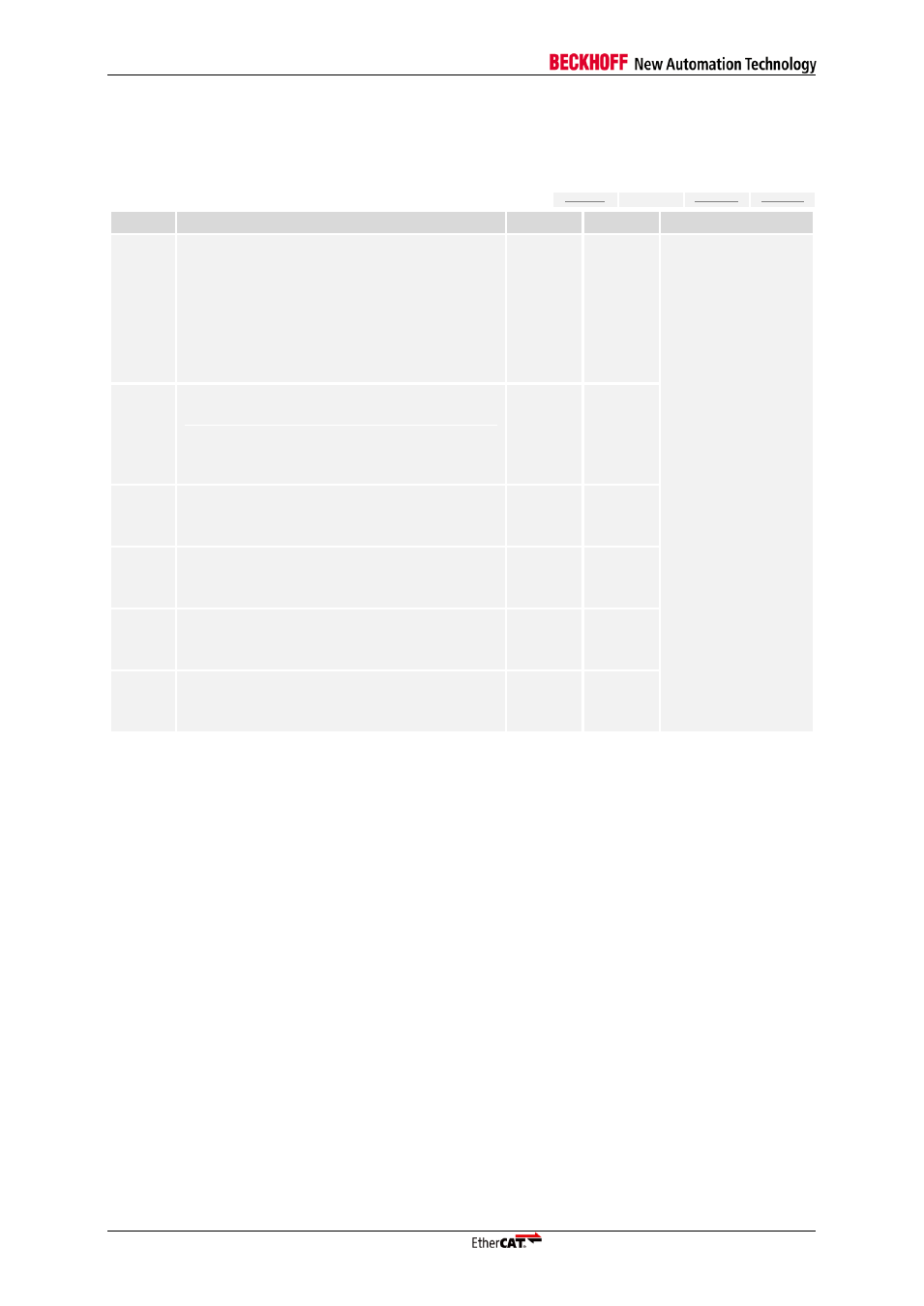
3.28.4 PDI 8/16Bit synchronous Microcontroller configuration
Table 39: Register PDI Synchronous Microcontroller Configuration (0x0150)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
1:0
TA output driver/polarity:
00: Push-Pull active low
01: Open Drain (active low)
10: Push-Pull active high
11: Open Source (active high)
NOTE: Push-Pull: no CS
→ no TA (driven)
Open Drain/Source: no CS
→ TA open
r/-
r/-
0, later EEPROM ADR
0x0001
3:2
IRQ output driver/polarity:
00: Push-Pull active low
01: Open Drain (active low)
10: Push-Pull active high
11: Open Source (active high)
r/-
r/-
4
BHE/Byte Enable polarity:
0:
Active low
1:
Active high
r/-
r/-
5
ADR(0) polarity:
0:
Active high
1:
Active low
r/-
r/-
6
Byte access mode:
0:
BHE or Byte Enable mode
1:
Transfer Size mode
r/-
r/-
7
TS Polarity:
0:
Active low
1:
Active high
r/-
r/-
Table Register Sync/Latch[1:0] PDI Configuration (0x0151) moved to chapter 3.28.7