0x092c:0x092f, System time difference, 0x0930:0x0931 – BECKHOFF EtherCAT Registers Section II User Manual
Page 76: Speed counter start, 0x0932:0x0933, Speed counter diff, 0x0934, System time difference filter depth
Distributed Clocks (0x0900:0x09FF)
II-64
Slave Controller
– Register Description
Table 102: Register System Time Delay (0x0928:0x092B)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
31:0
Delay between Reference Clock and the
ESC
r/(w)
r/(w)
0
NOTE: Write access to this register depends upon ESC configuration (typically ECAT, PDI only with explicit ESC
configuration: System Time PDI controlled). Reset internal system time difference filter and speed counter filter by
writing Speed Counter Start (0x0930:0x0931) after changing this value.
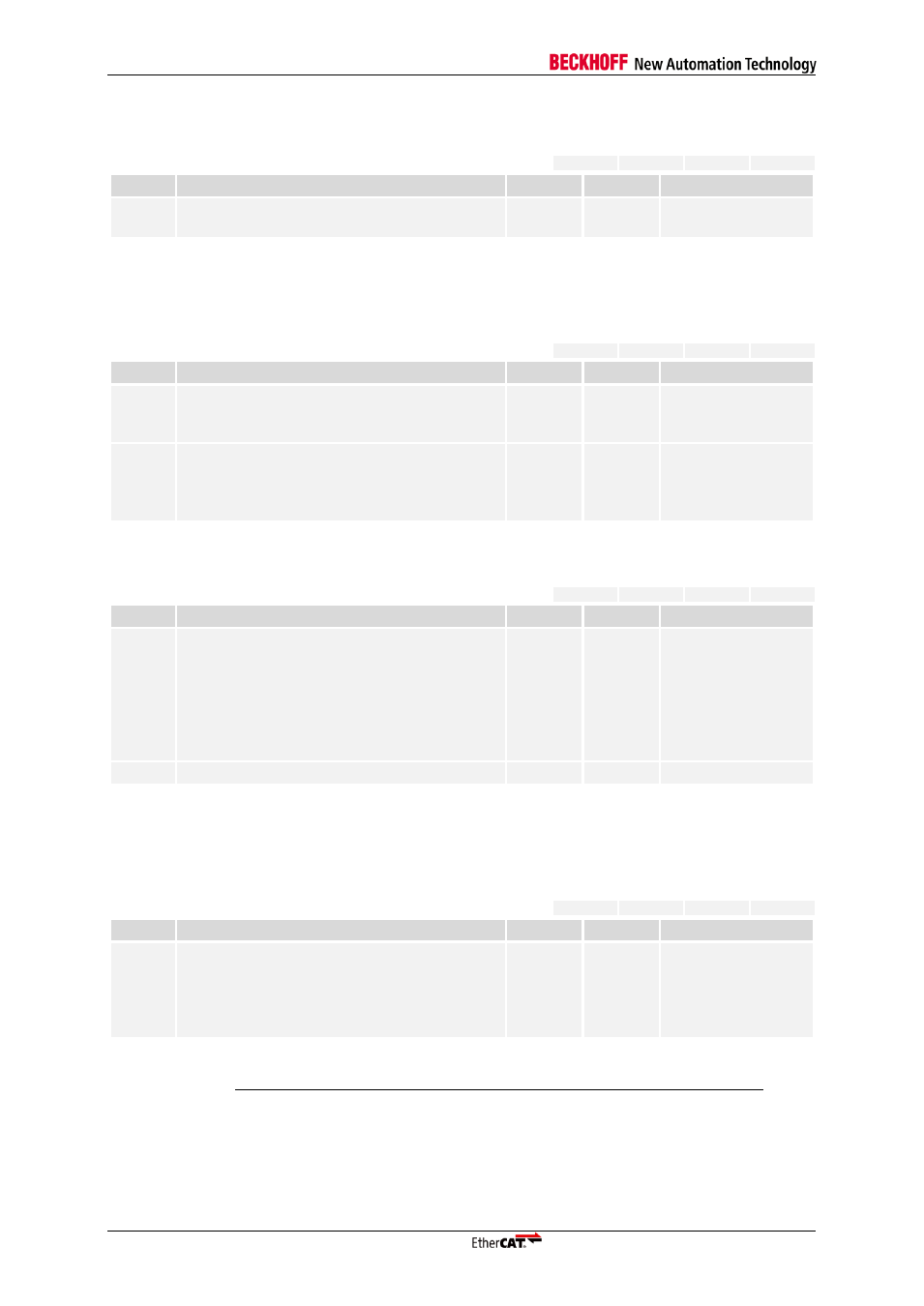
Table 103: Register System Time Difference (0x092C:0x092F)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
30:0
Mean difference between local copy of
System Time and received System Time
values
r/-
r/-
0
31
0:
Local copy of System Time greater than
or equal received System Time
1:
Local copy of System Time smaller than
received System Time
r/-
r/-
0
Table 104: Register Speed Counter Start (0x0930:0x931)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
14:0
Bandwidth for adjustment of local copy of
System Time (larger values
→ smaller
bandwidth and smoother adjustment)
A write access resets System Time
Difference (0x092C:0x092F) and Speed
Counter Diff (0x0932:0x0933).
Minimum value: 0x0080 to 0x3FFF
r/(w)
r/(w)
0x1000
15
Reserved, write 0
r/-
r/-
0
NOTE: Write access to this register depends upon ESC configuration (typically ECAT, PDI only with explicit ESC
configuration: System Time PDI controlled).
Table 105: Register Speed Counter Diff (0x0932:0x933)
ESC20
ET1100
ET1200
IP Core
Bit
Description
ECAT
PDI
Reset Value
15:0
Representation of the deviation between
local clock period and Reference Clock’s
clock period
(representation: two’s
complement)
Range: ±(Speed Counter Start
– 0x7F)
r/-
r/-
0x0000
NOTE: Calculate the clock deviation after System Time Difference has settled at a low value as follows:
2)
Diff
Counter
Speed
Start
Counter
2)(Speed
Diff
Counter
Speed
Start
Counter
(Speed
5
Diff
Counter
Speed
Deviation