Appendix m: default parameters of pandaⅡ autopilot, Pid control – FeiYu Tech FY-Panda2 Autopilot User Manual
Page 69
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 66
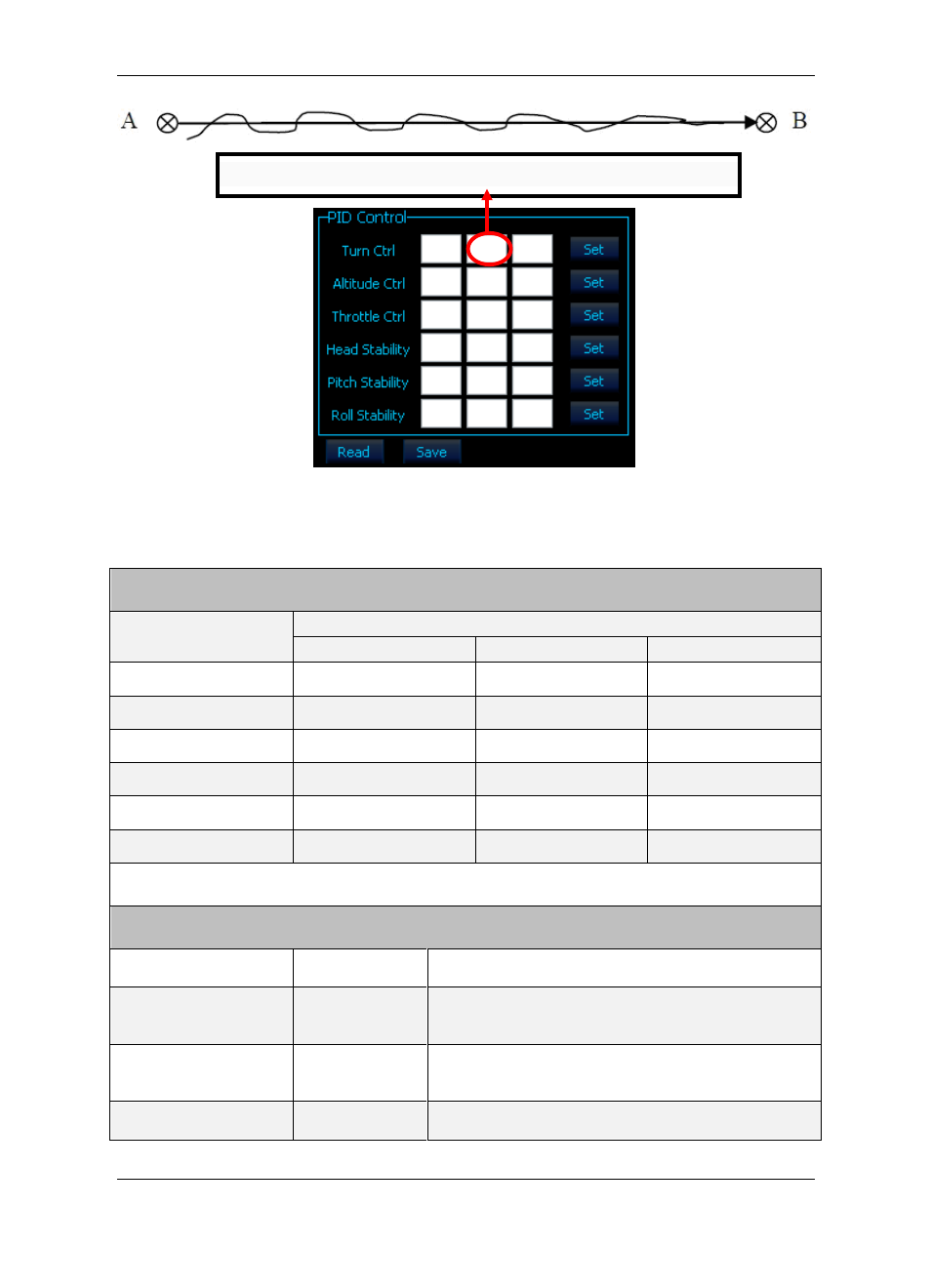
Appendix M: Default Parameters Of PandaⅡ Autopilot
PID Control
Name
Parameter
P
I
D
Turn Ctrl
60
20
60
Altitude Ctrl
50
10
50
Throttle Ctrl
50
10
50
Head Stability
50
10
50
Pitch Stability
50
20
50
Roll Stability
50
20
50
Flight Parameters
Name
Parameter
Instruction
TGT SPD
68.4 (Km/h)
The expectations speed when work in the navigation
working mode.
TGT ALT
0 (m)
The expectations altitude when work in the navigation
working mode.
CIR RAD
120 (m)
The circling radius when hovering.
On the basis of the original value, decrease this parameter
See also other documents in the category FeiYu Tech Accessories communication:
- FY Autopilot & AFSS (7 pages)
- FY-G4 3-Axis Handheld Gimbal For Smartphone (2 pages)
- G4 3-Axis Handheld Gimbal (2 pages)
- G3 Gimbal (2 pages)
- FY-G3Ultra 3-Axis Handheld Gimbal (2 pages)
- FY-G3 Ultra 3-Axis Brushless Gimbal For Aircraft (2 pages)
- FY-Panda2 Autopilot (41 pages)
- FY-Panda2 Autopilot (51 pages)
- FY-Panda2 Autopilot (53 pages)
- Panda Autopilot (53 pages)
- FY-41AP (48 pages)
- FY-41AP (32 pages)
- FY-41AP (18 pages)
- FY-41AP (30 pages)
- FY-41AP (35 pages)
- FY-41AP (28 pages)
- FY-41AP (31 pages)
- FY-41AP Lite (35 pages)
- FY-605 Data Radio (6 pages)
- FY-DOS (18 pages)
- FY-DOS (11 pages)
- FY-DOS (16 pages)
- FY-DOS (21 pages)
- FY-40A (8 pages)
- FY-901 (3 pages)
- FY-30A (13 pages)
- FY-30A (4 pages)
- FY-31AP (7 pages)
- FY-31AP (8 pages)
- FY-AHRS-2000B (14 pages)
- FY-AHRS-2000B (12 pages)
- Hornet-OSD (2 pages)
- FY-606 Data Radio (2 pages)
- FY-91Q (4 pages)
- FY-91Q (27 pages)
- FY-21AP (5 pages)
- FY-3ZT (57 pages)
- FY-ARHS-1200A (12 pages)
- FY-AHRS-1200B (8 pages)
- FY-Y6 (7 pages)
- FY-X4 (7 pages)
- FY-AP117 (1 page)
- FY-90Q (2 pages)
- FY-602 Data Radio (7 pages)