Rudder, Throttle – FeiYu Tech FY-Panda2 Autopilot User Manual
Page 30
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 27
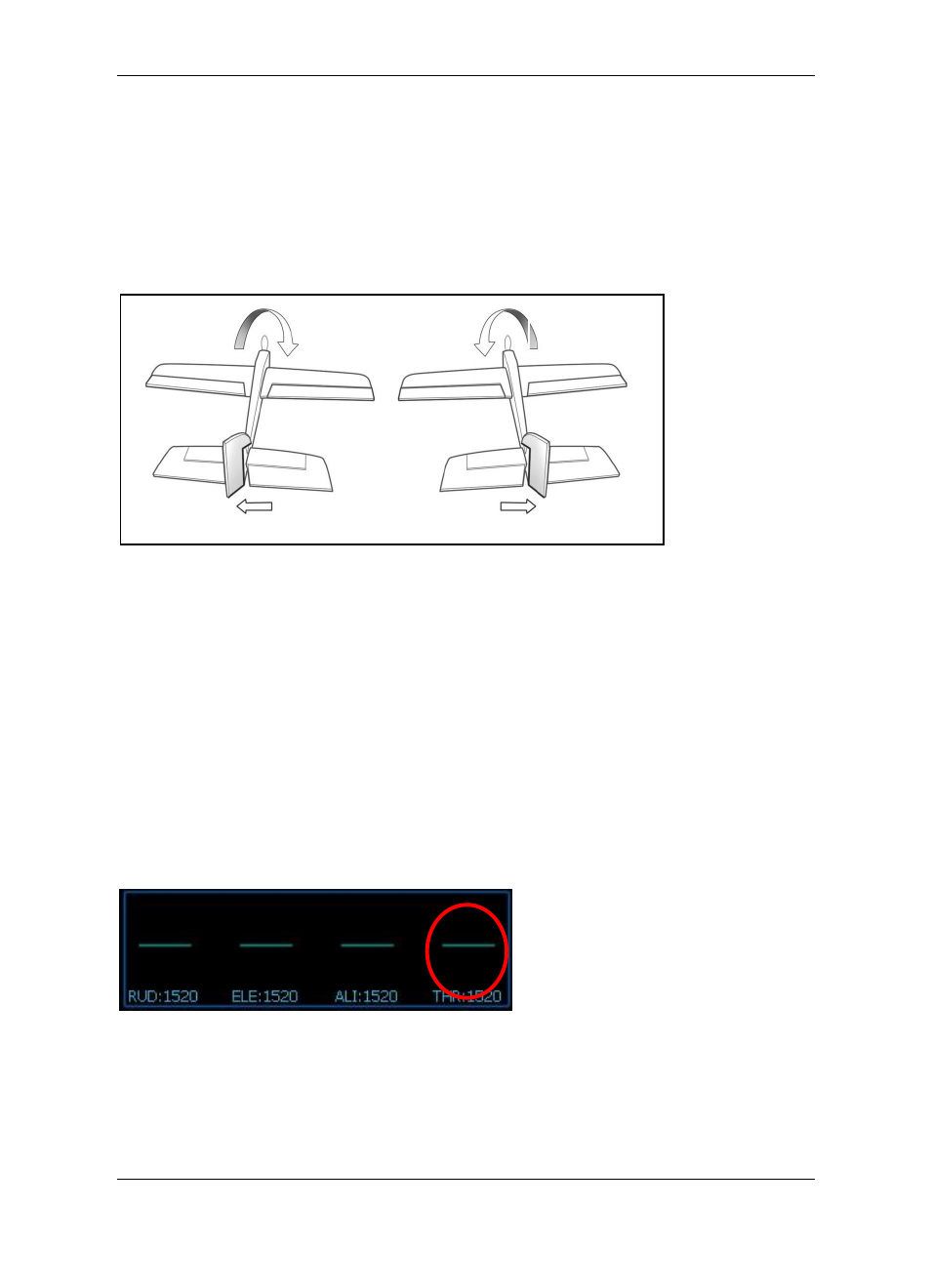
Rudder
( Check In "Auto Balance Mode" )
Clockwise rotate the aircraft, the rudder should move to the left.
Counter clockwise rotation, the rudder should move to the right
If the servo movement is incorrect, you need to reverse the automated servo
movement please select
“RUD REV”.
Turn left
Rudder moves to the right
Turn right
Rudder moves to the left
Throttle
Warning:
It is recommended that remove the prop or disable the motor while
performing these setup procedure.
Pleases refer to the throttle output at the servo display as shown to the right. With
the throttle at the
lowest setting
the number should read
1000
. As the throttle up this
number should get larger. If instead the number reads 2000 and
gets smaller
as you
increase the throttle please select
“THR REV”
(2)Parachute servo direction setting
Parachute servo have to plug to S8 on the Panda
Ⅱ.When the PandaⅡ autopilot
system power on and start normally ,the parachute servo will revert to its default position