Automatic landing achieving – FeiYu Tech FY-Panda2 Autopilot User Manual
Page 38
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 35
14.4.2 Automatic Landing Achieving
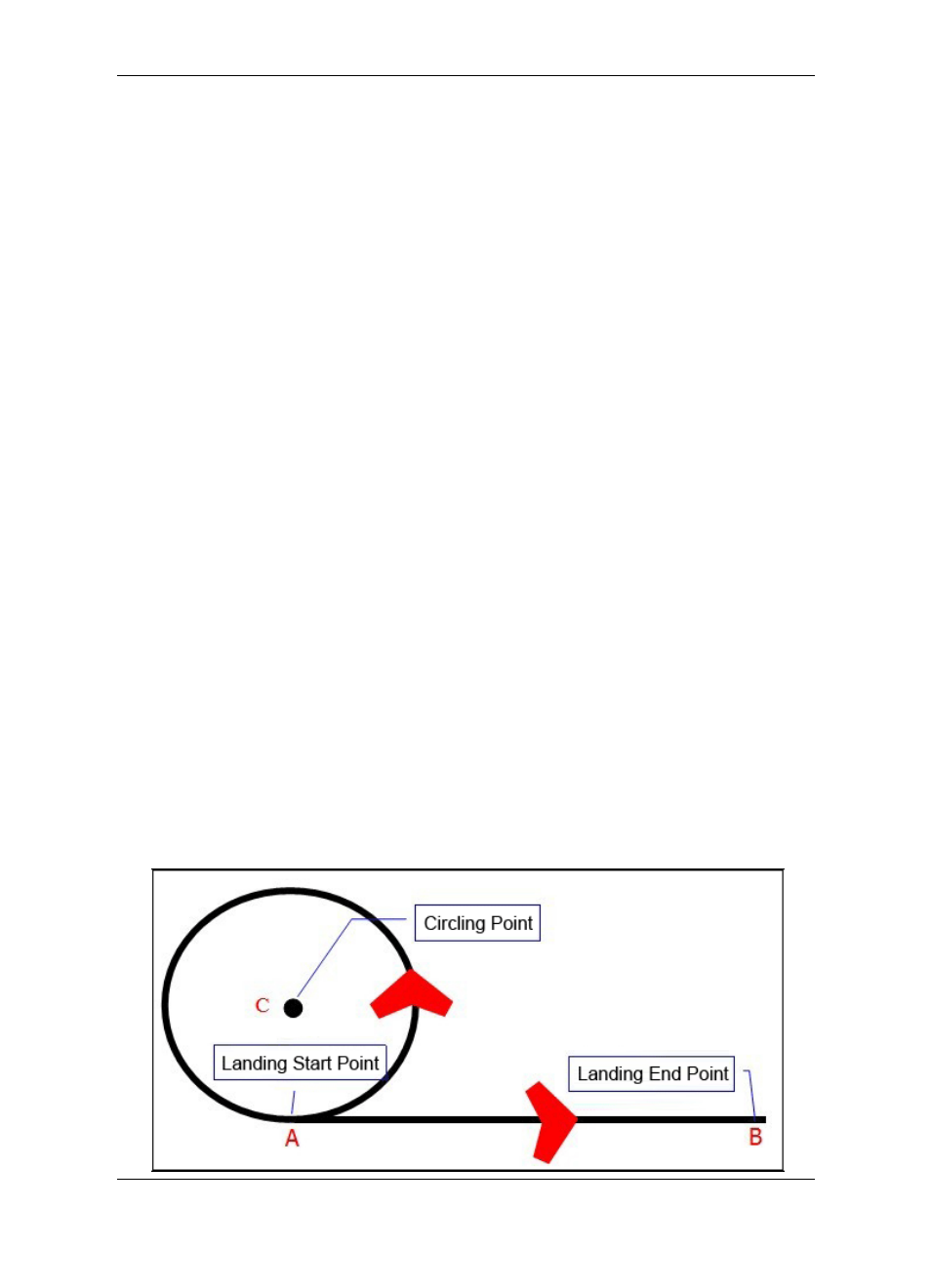
In order to achieve the auto landing, the aircraft need two points to confirm the
landing route: Landing start point and Landing end point. PandaⅡ autopilot will generate
the landing route according to this two point. Refer to the picture, landing start point
―A‖,
landing end point
―B‖, landing route ―A->B‖, distance of ―A‖ and ―B‖ suggest set up more
than 5 meters.
Steps of Automatic Landing Achieving
Step A: Click on
―A Land‖ button on the GCS, the aircraft will fly to circling point ―C‖.
Step B: The aircraft descent to the suitable altitude for entering to the landing route
while circling. LINEAR Landing Mode: Altitude descent to 40 meters; PARACHUTE
Landing Mode: Altitude descent to the parameter which you set via
―OpenP Alt‖ on the
GCS.
Step C: The aircraft enter to the Landing route
―A->B‖ after descent to the target
altitude.
Step D: The autopilot will
control the aircraft landed at point‖ B‖, and cut down the
throttle before landing.
LINEAR Landing Mode
:The throttle will be cut down when the aircraft descent to
the altitude which less than 12meters;
PARACHUTE Landing Mode: The throttle will be cut down when the aircraft arrive
at a suitable distance before landing end point
―B‖, then shoot out parachute for landing.
Step E: Aircraft landing, the process of the automatic landing finish.
The aircraft land to the ground, the autopilot will switch to “RC”
working mode automatically and keep the throttle cut down.
Automatic landing need for a range of open space. And the auto landing
mode is suitable for small and throwing UAV. Maybe it is possible to
damage the plane ,please used with caution.