Automatic landing, Automatic landing mode setting, 4 automatic landing – FeiYu Tech FY-Panda2 Autopilot User Manual
Page 37
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 34
climbing;
Phase Two: The aircraft will turn into auto circle mode automatically after climb to the
target altitude. Afterwards the aircraft climb to the new target altitude 110 meters while fly
to the home point then hover above the home point and wait for the next command.
In the process of the auto take off process, the throttle can not control by pilot,
another rockers (Aileron, Elevator, Rudder) of the remote control can manual
assisted for auto take off.
If the communication of date radio being interrupt, the aircraft will not turn into
the "RTL" mode before finish the phase one in auto take-off process.
If the GPS signal lost after the finish the phase one, the aircraft will turn into
NO GPS auto circle mode.
Two methods for canceling the auto take off
:Click on the “Cancel” button on
the GCS in page
“Control” in tool bar
;Switch to the navigation mode via the
SW2.If you want to enter the manual working mode please switch SW2 tot the
“NULL” position to out of the navigation mode.
14.4 Automatic Landing
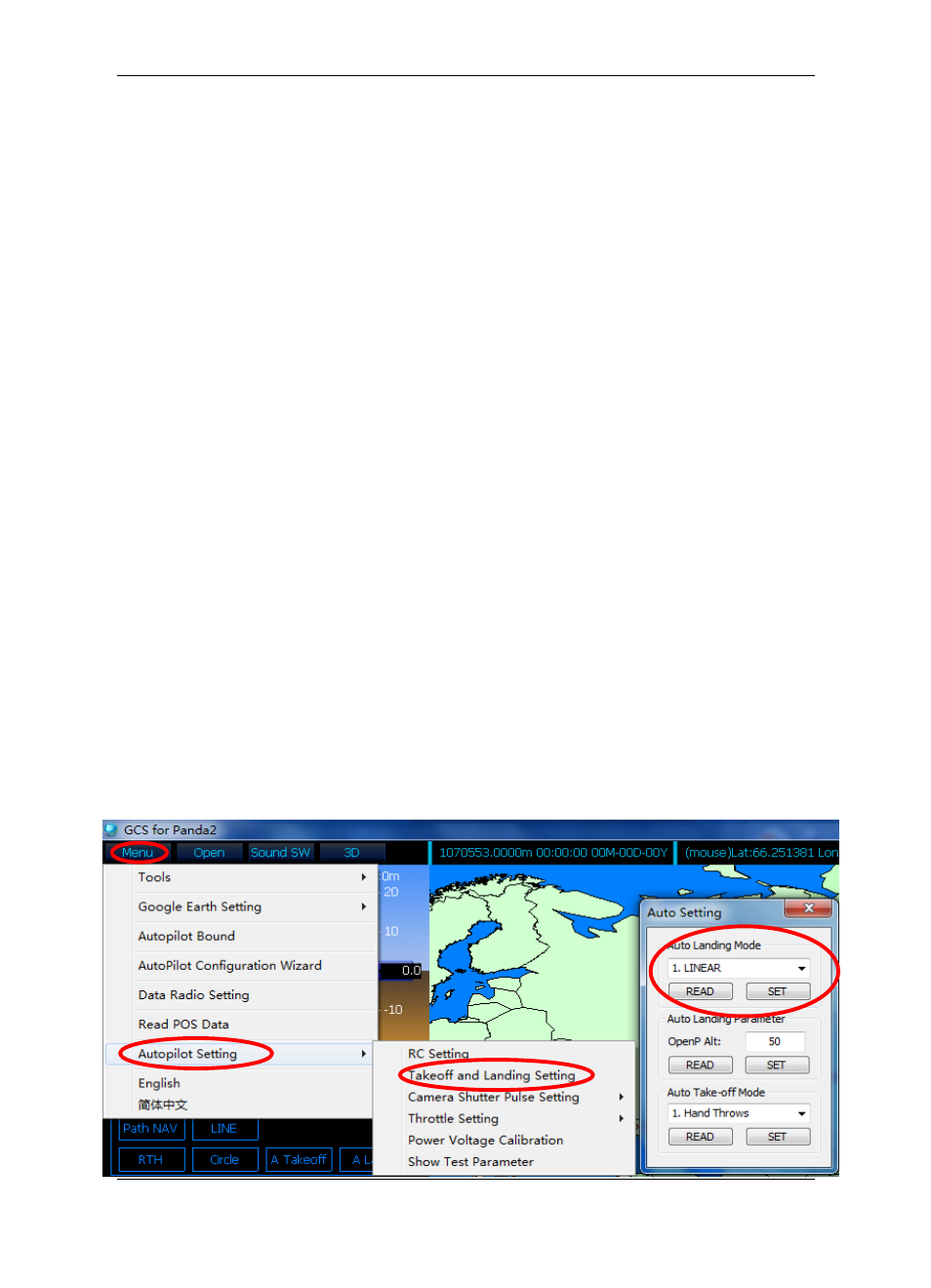
14.4.1 Automatic Landing Mode Setting
PandaⅡ autopilot has two auto landing
modes (―LINEAR‖ and ―PARACHUTE‖) for
selection and can set up via the GCS software. ―Menu‖ ——‖ Autopilot Setting‖
—— ‖Takeoff and Landing Setting‖ then select the needful auto landing mode. Default
mode is ―LINEAR‖
Please connect the parachute servo to the S8 on the Panda2 if select the
“PARACHUTE” Landing Mode.