6ć17, Interpreting modulećtoćplc data (reads) chapter 6, Figure 6.14 maximum velocity words – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 78
Interpreting ModuleĆtoĆPLC Data
(READS)
Chapter 6
6Ć17
Maximum Velocity (words 30, 31 and 32, 33)
The maximum velocity words represent the maximum speed that the system is
capable of moving in each direction, and not necessarily the maximum velocity
of a particular move.
The module calculates the theoretical maximum positive and negative velocities
by monitoring jogs or setpoint or motion block moves and extrapolating the
maximum speeds possible with the servo valve fully open.
The maximum velocity values returned by the module can greatly simplify the
tuning procedures for your axes. You can enter the maximum positive velocity
as the optimal positive analog calibration constant, and the maximum negative
velocity as the optimal negative analog calibration constant. The module will
use these values to adjust the PID and feedforward gains for directional
differences in system performance.
The maximum velocity words can also be used to monitor the performance of
the hydraulics. If the maximum velocity changes dramatically, the hydraulics
may require servicing.
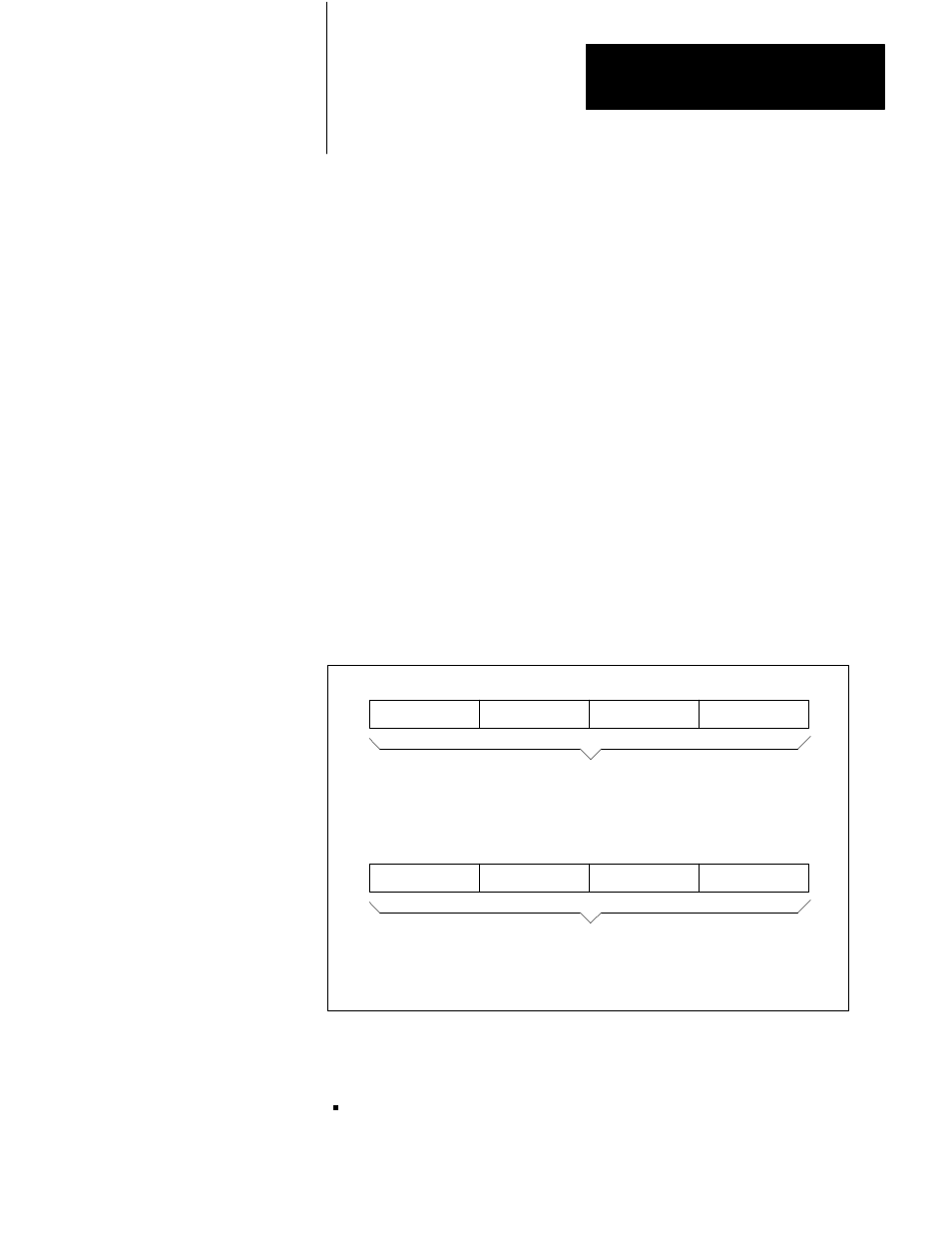
Figure 6.14
Maximum Velocity Words
50028
Maximum positive velocity,
BCD 99.99 ips or 999.9 mmps max
Binary 327.67 ips or 3276.7 mmps max
Maximum negative velocity,
BCD 99.99 ips or 999.9 mmps max
Binary 327.67 ips or 3276.7 mmps max
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
While every effort has been made to ensure that the maximum velocity
calculations are foolproof, the following limitations do exist:
the module will ignore moves where a constant velocity is not achieved. The
maximum velocity calculations are only accurate when the axis stabilizes at a
constant velocity.