Interpreting modulećtoćplc data (reads) chapter 6, Status word 2 (words 3 and 7), Figure 6.4 status word 2 – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 68
Interpreting ModuleĆtoĆPLC Data
(READS)
Chapter 6
6Ć7
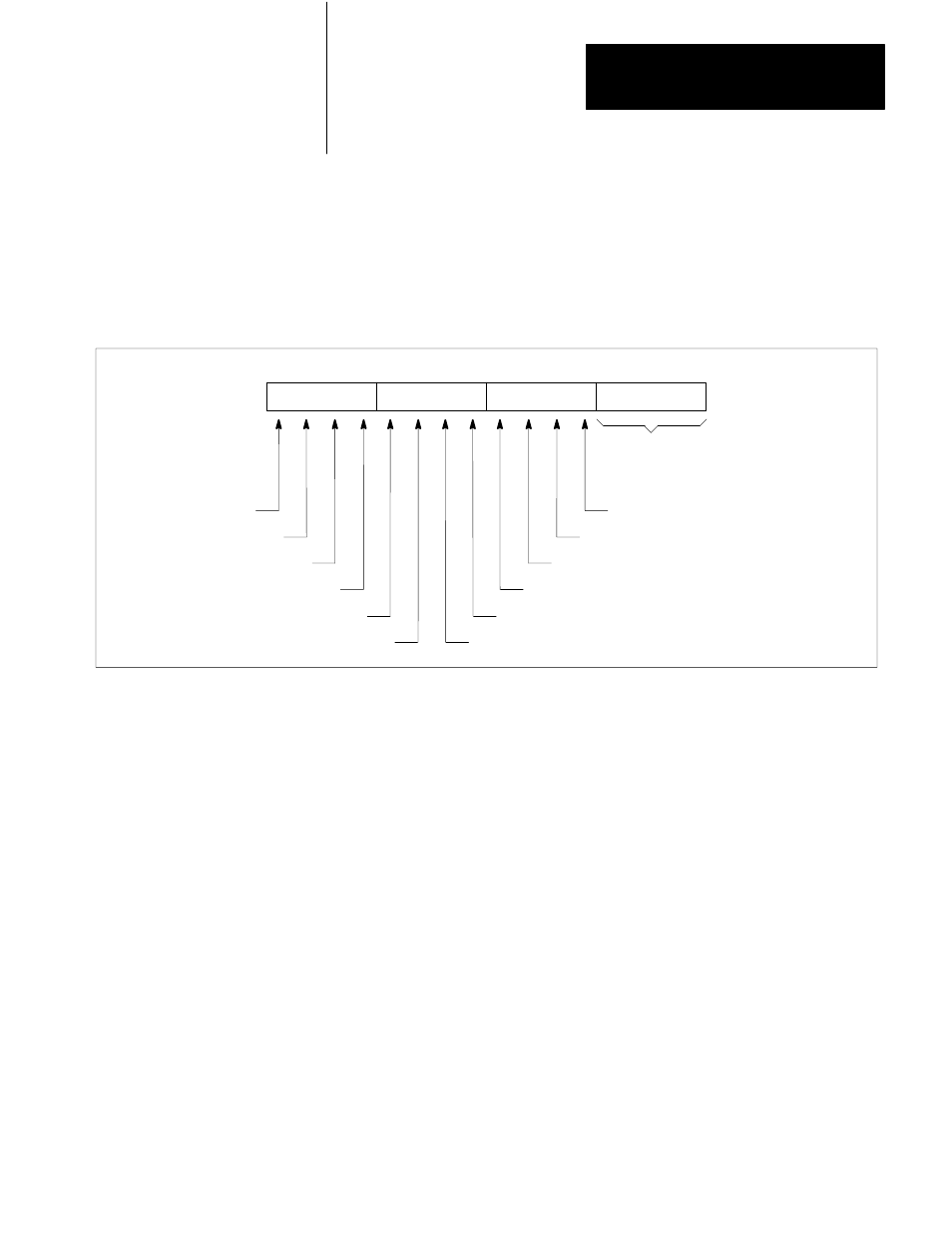
Status Word 2 (words 3 and 7)
Status word 2 gives the active setpoint and provides additional status
information.
Figure 6.4
Status Word 2
50053
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
0
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
Reserved
Error valid
Position valid
Diagnostic valid
Setpoint Number,
binary format (0Ć13),
(15 Ć a motion segment
is active)
Integral limit reached
Excess following error
PID error
Immediate stop
Discrete fault
Feedback fault
Analog fault
Internal fault
Bits 0 to 3 – Setpoint Number
Bits 0 to 3 give the currently active setpoint (1 to 13 in binary format), or
indicate that a motion segment is active (15 binary). This parameter defaults to
zero on powerup or after a jog command. It then remains zero until a setpoint or
motion start is received and accepted.
The currently active setpoint is the target point of the latest initiated axis move.
If hardware started is enabled, the module won’t update the setpoint number to a
commanded setpoint until after it receives a hardware start.
Bit 4 – Reserved
Bit 4 is reserved for future use.
Bit 5 – Error Valid
The error valid bit is on if the next two status block words (i.e., words 4 and 5
for axis 1 and words 8 and 9 for axis 2) for this axis contain a valid following
error value.