Interpreting modulećtoćplc data (reads) chapter 6 – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 65
Interpreting ModuleĆtoĆPLC Data
(READS)
Chapter 6
6Ć4
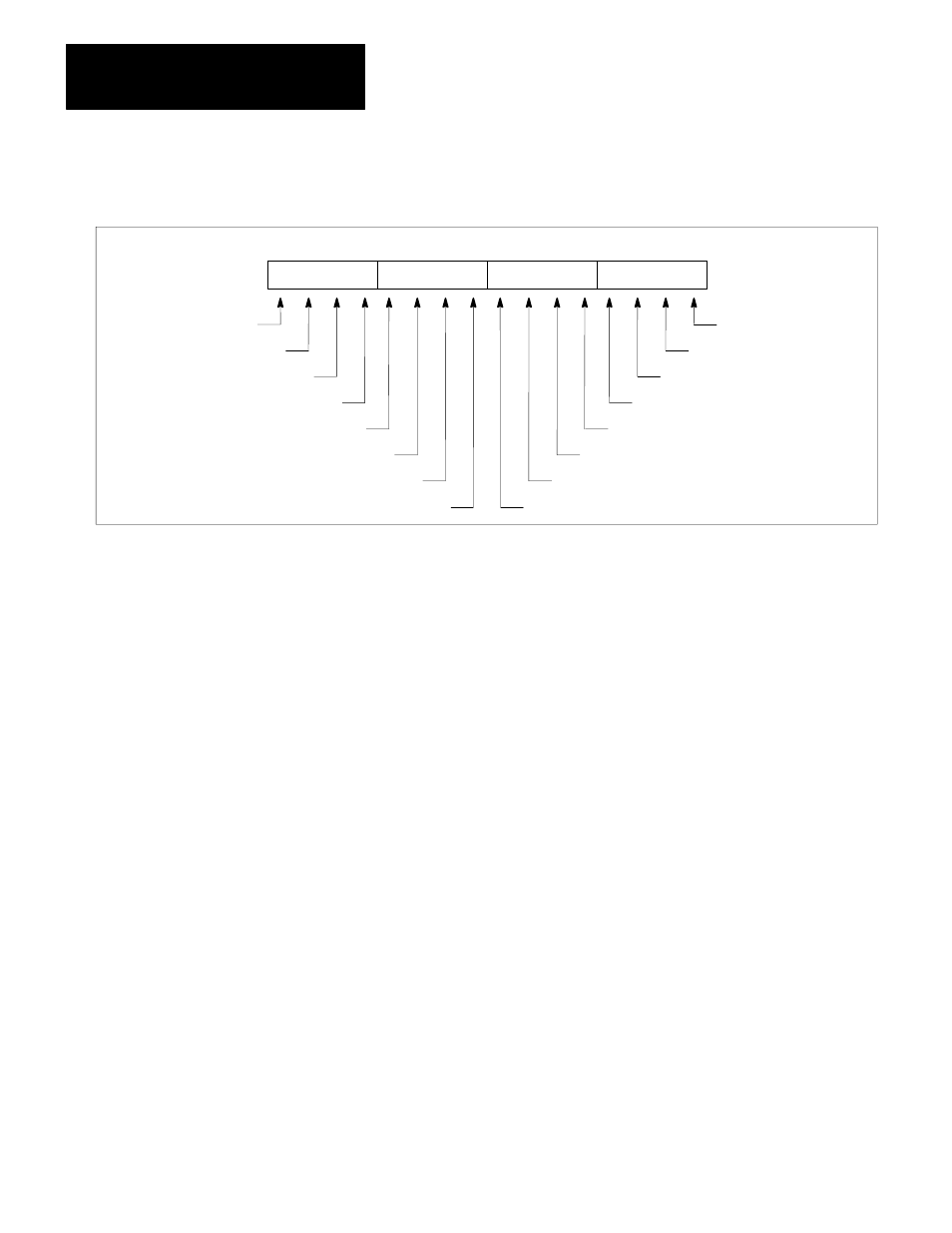
Figure 6.3
Status Word 1
50052
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Ready
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
Setpoints received
Done
InĆPosition
Auto Mode
Programming error
PID active
Block transfer write toggle
Input 1
Stop
Start
Auto/manual
Inputs enabled
Jog forward
Jog reverse
Input 2
Bit 1 – Setpoints Received
The setpoints received bit is off after powerup or after a reset command. It
turns on after the module receives a valid setpoint block for the loop.
Bit 2 – Done
The module turns the done bit on when the module has finished traversing the
axis velocity profile. At this point, the desired velocity is zero and the position
command is stabilized at the target endpoint. The module turns this bit off when
you command a new setpoint move or jog.
Important: If this bit turns on, it does not mean that the axis is in position yet.
Bit 3 – In-Position
The in-position bit turns on when the done bit is on and the following error has
closed to within the in-position band defined in the parameter block. When the
in-position bit is on, the axis has moved to within a specified distance of the
programmed endpoint.
If configured as the in-position output, then the OUTPUT 1 hardware output
reflects the status of this bit. The in-position bit turns off when the axis receives
a jog command or begins a move to a new setpoint.
Important: When OUTPUT 1 turns off, it remains off for at least 16
milliseconds. This provides compatibility with the hardware start input.