Interpreting modulećtoćplc data (reads) chapter 6 – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 72
Interpreting ModuleĆtoĆPLC Data
(READS)
Chapter 6
6Ć11
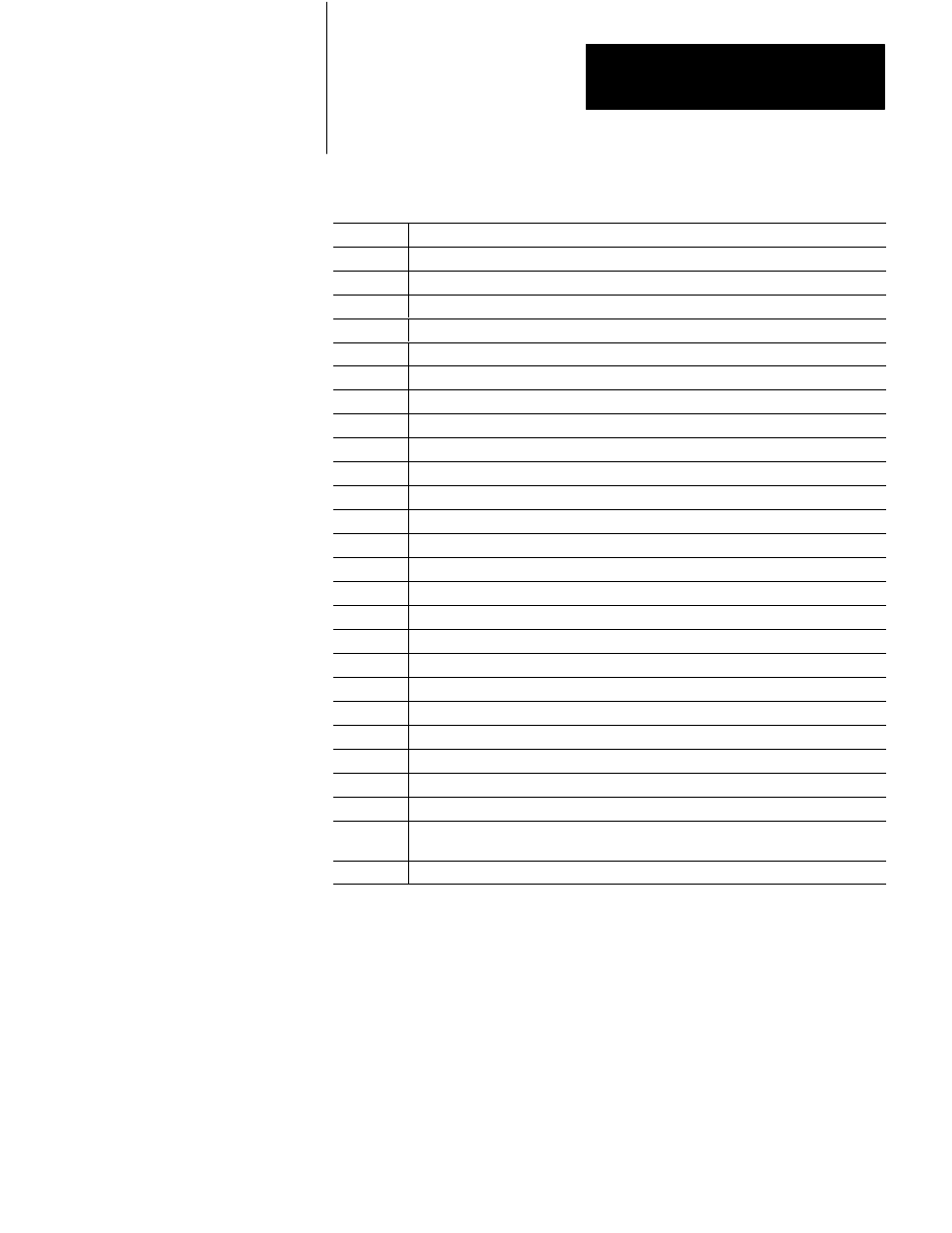
Table 6.A
Error Codes
Code
Definition
00
No errors detected
01
Invalid block identifier
02
NonĆBCD number entered
03
Invalid bit setting, unused bits must be set to zero
04
Data is out of range
05
Invalid number of axes programmed
06
Setpoint is not defined
07
Setpoint commanded while in manual mode
08
Position exceeds a software travel limit
09
Attempted to switch to auto mode with axis in motion
10
Attempted to switch to manual mode with axis in motion
11
Velocity exceeds maximum
12
High jog rate > maximum velocity
13
Low jog rate > high jog rate
14
Maximum PID error must be outside the PID band
15
Incorrect block length
16
First block after powerup must be a parameter block
17
Negative travel limit
positive travel limit
18
Jog commanded while in auto mode
19
Forward and reverse jogs commanded simultaneously
20
Block transfer write attempted before module confirmed all power on wiring arm
21
Specified velocity exceeds maximum velocity for direction of motion
22
Motion segment ID not defined
23
Motion segment commanded while in manual mode
24
A motion segment is attempting to use an output which is not configured as a
programmable output
25
Motion segment ID previously defined in same motion block
Position Information (words 4, 5; 8, 9; 12, 13; and 14, 15)
The position words give the present position measured at the transducer. The
position information is in either BCD or binary format. You choose the format
you want through the parameter block. Binary format is compatible with integer
data (16-bit 2’s complement) used by PLC-5 family programmable controllers.
See Appendix H for an explanation of numbering formats.
The maximum position displayed is
±
799.900 inches or
±
7999.00 millimeters.
If the status words 4, 5 and 8, 9 are specified in the command block to display
position, when the axis exceeds the maximum, the maximum is displayed and
the position valid bit in the second status word turns off.