Advanced features chapter 9 – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 134
Advanced Features
Chapter 9
9-3
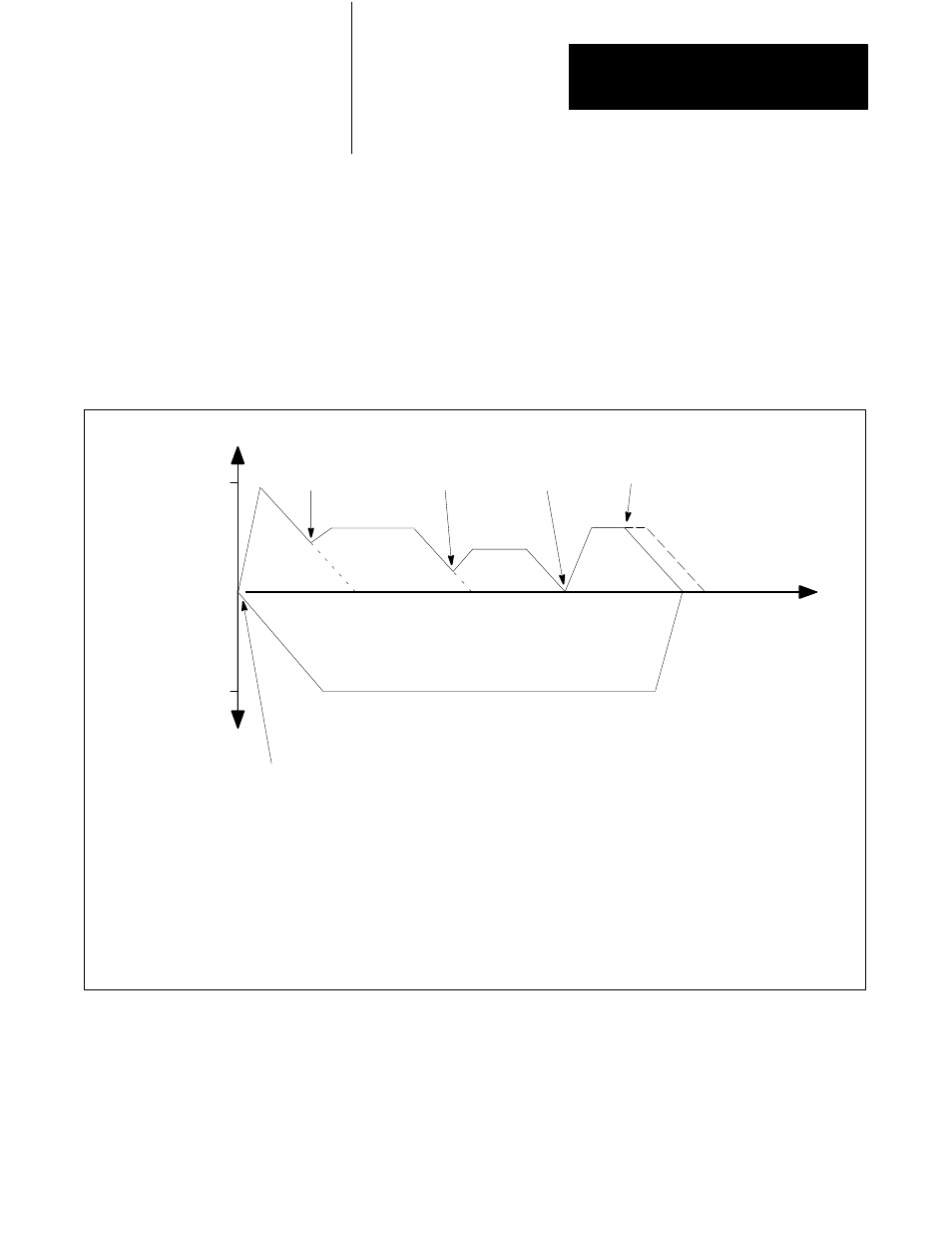
Figure 9.2 illustrates a motion profile consisting of five motion segments.
Segments 14 through 17 move the axis in one direction, while segment 18
returns it to its original position and triggers segment 14. The solid line
indicates the actual axis movement and the dotted lines show the profile of
each motion segment if its motion were not interrupted by the triggering of
the subsequent motion segment. See Chapter 10 for a detailed explanation
of the ladder logic for this example (Sample Application Program #2).
Figure 9.2
Profile Using Motion Segments
50096
VELOCITY
(in/s)
0
Motion Segment #16
- desired position: 14"
- local velocity: 2 in/s
- acceleration: 2 ips/s
- deceleration: 1 ips/s
- INPUT 1 trigger active
- next motion segment: #17
Motion Segment #17
- desired position: 20"
- local velocity: 3 in/s
- acceleration: 3 ips/s
- deceleration: 1 ips/s
- INPUT 2 trigger active
- next motion segment: #18
Motion Segment #18
- desired position: 0"
- local velocity: 5 in/s
- acceleration: 5 ips/s
- deceleration: 1 ips/s
- INPUT 1 AND position (0")
triggers active
- next motion segment: #14
Discrete INPUT 1
AND Position
trigger (0")
Motion Segment #14
- desired position: 5"
- local velocity: 5 in/s
- acceleration: 4 ips/s
- deceleration: 1 ips/s
- position trigger active (3")
- next motion segment: #15
Motion Segment #15
- desired position: 10"
- local velocity: 3 in/s
- acceleration: 1 ips/s
- deceleration: 1 ips/s
- velocity trigger active (1 in/s)
- next motion segment: #16
Position
trigger
(3")
Velocity
trigger
(1 in/s)
Discrete
INPUT 1
trigger
Discrete
INPUT 2
trigger
#14
#15
#16
#17
2"
4"
6"
8"
10"
12"
14"
16"
18"
20"
5
-5
#18
Position (in)
Important: When linking multiple motion segments together, as shown in
Figure 9.2, it is important to remember that while the axis is in motion, the
deceleration cannot be decreased until after the done bit goes high and
deceleration can only be increased if velocity smoothing is disabled. The
same criteria apply as for issuing software start commands with the axis in
motion. See the section, Command Block, in Chapter 7.