Rockwell Automation 1771-QB Linear Pos. User Manual
Page 21
Positioning Concepts
Chapter 2
2Ć5
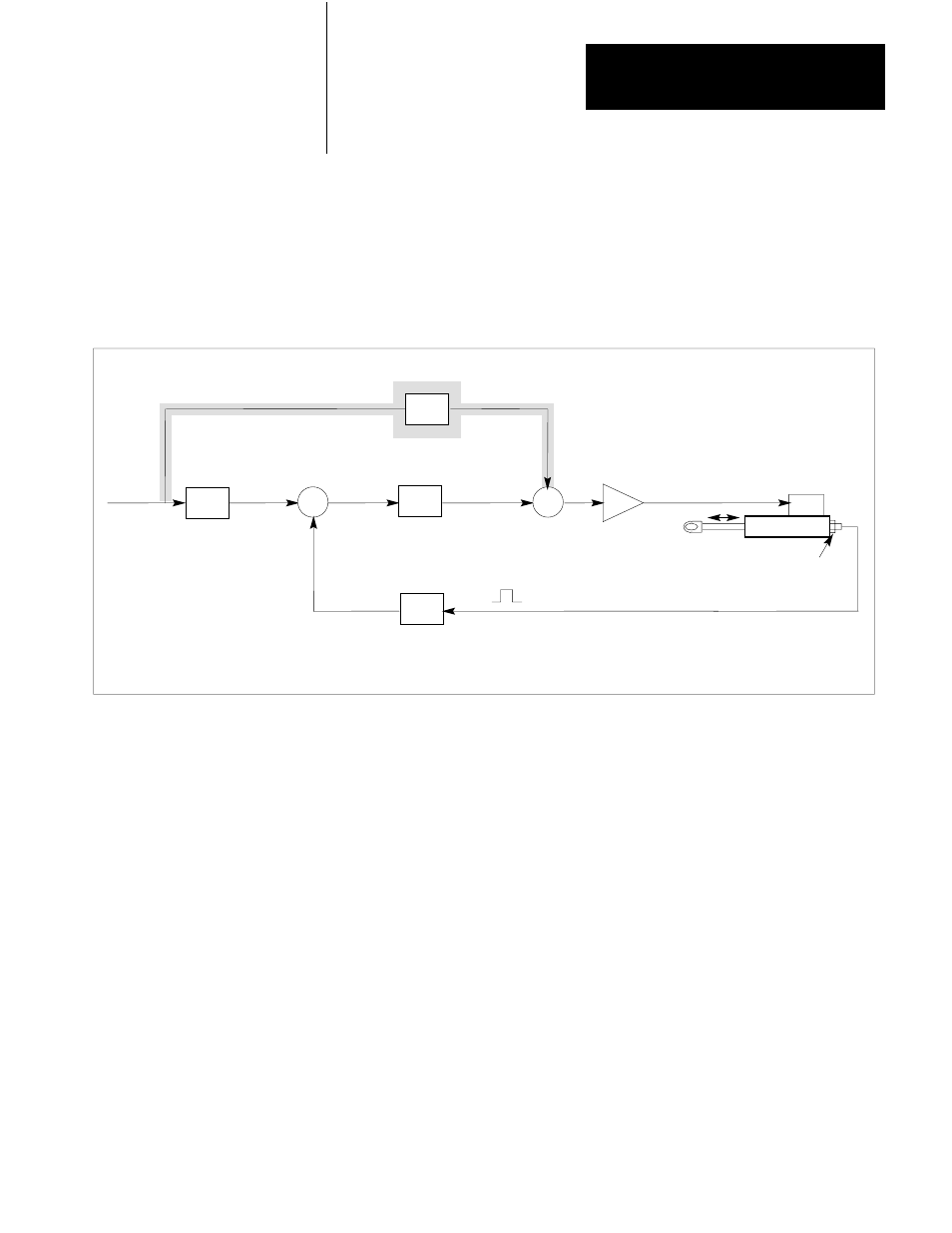
Feedforwarding
To decrease the following error without increasing the gain, you can add a
feedforward component. (See Figure 2.5.)
Figure 2.5
Positioning Loop with Feedforwarding
50037
Linear
Displacement
Transducer
Servo Valve
Desired
Velocity
Axis
Velocity
Command
s
Following
Error
dt
Position
Command
s
dt
K
Kp
D/A
Integrator
+
+
F
+
-
Actual
Position
Feed
Forward
Feedforwarding requires an additional summing point and an amplifier.
Multiply the desired velocity by the feedforward gain K
F
to produce a
feedforward value. The feedforward value, added to a multiplication of the
following error by the proportional gain (K
P
), generates the velocity command.
Without feedforwarding, axis motion does not begin until the following error is
large enough to overcome friction and inertia. The feedforward component
generates a velocity command to move the cylinder almost immediately. This
immediate response keeps the actual position closer to the desired position and
thereby reduces the following error.
Integral Control (Reset Control)
You can increase the positioning accuracy of the control loop by adding an
integral component. (See Figure 2.6.)
To achieve the integral component of the positioning loop, integrate the
following error over time and amplify it to produce an integral value. Then add
this integral value to the proportional component and the feedforward value to
generate the velocity command.