Rockwell Automation 1771-QB Linear Pos. User Manual
Page 22
Positioning Concepts
Chapter 2
2Ć6
Without integral control, the axis responds only to the size of the positioning
error, not its duration. Integral control responds to both the size and duration of
the positioning error. Thus, the integral term continues to adjust the velocity
command until it achieves an exact correction.
When you increase the integral gain (K
I
), you increase the rate at which the
positioning loop responds to a following error. However, the capabilities of the
system limit gain K
I.
Too large a gain causes instability.
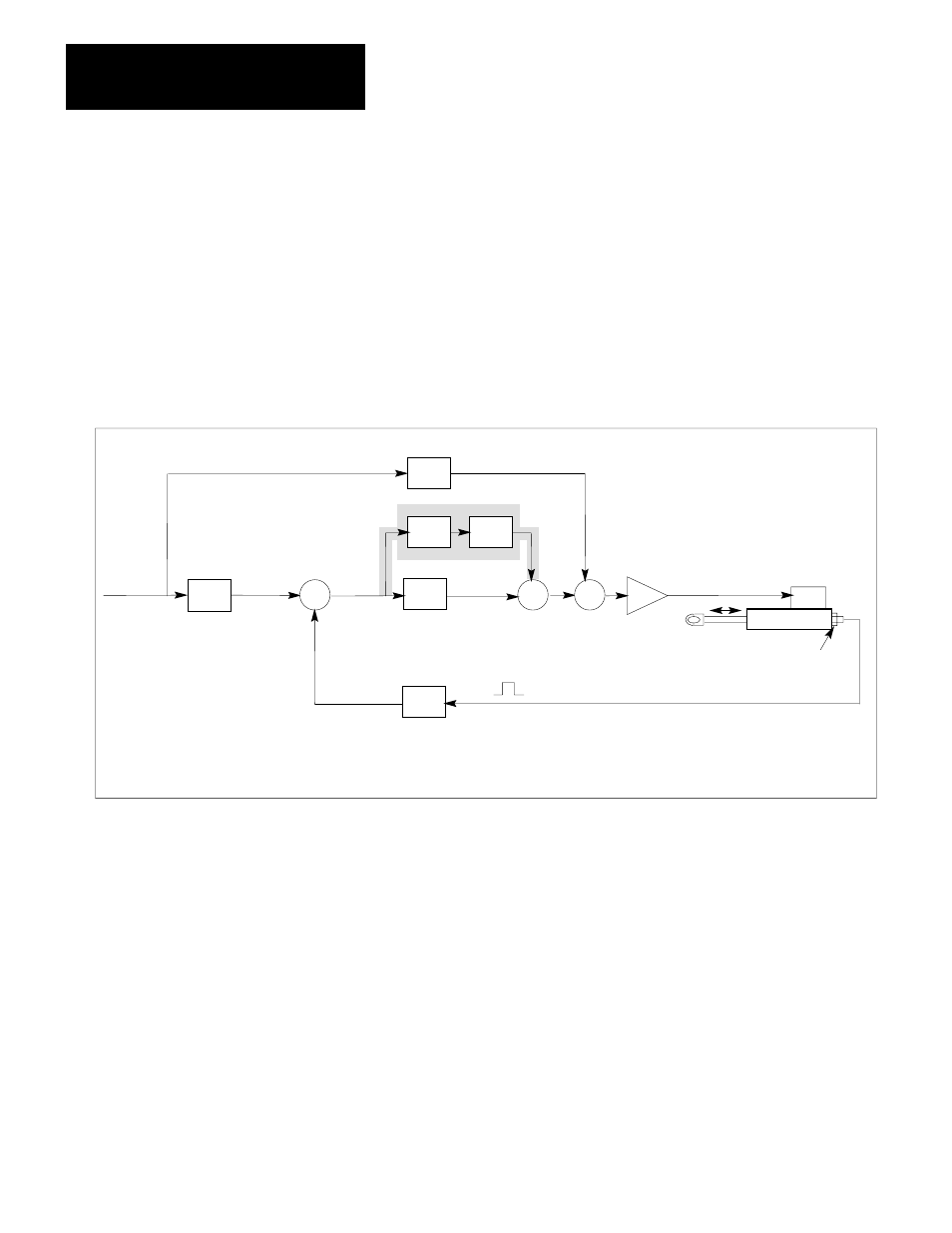
Figure 2.6
Integral Control
50038
Linear
Displacement
Transducer
Servo Valve
Desired
Velocity
Axis
Velocity
Command
s
Following
Error
dt
Position
Command
s
dt
K
Kp
D/A
Integrator
+
+
F
+
-
Actual
Position
Feed
Forward
+ +
s
dt
Integrator
I
K
Derivative Control (Rate Control)
Proportional and integral gains can cause instability in a positioning loop. The
cylinder can overshoot its programmed endpoints and oscillate or hunt around
them. You can increase the stability of the positioning loop by adding a
derivative component. (See Figure 2.7.)
Derivative control operates on the rate of change of positioning error. It helps to
stabilize the system by opposing changes in positioning error. However, a
derivative gain that is too large can cause instability. Derivative control is also
very susceptible to electrical noise.