7ć23, Formatting module data (writes) chapter 7, Example: following error calculation – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 102: Global velocity (words 23 and 52), If axis movement is 5 ips and proportional gain (k, Figure 7.31 global velocity word
Formatting Module Data (WRITES)
Chapter 7
7Ć23
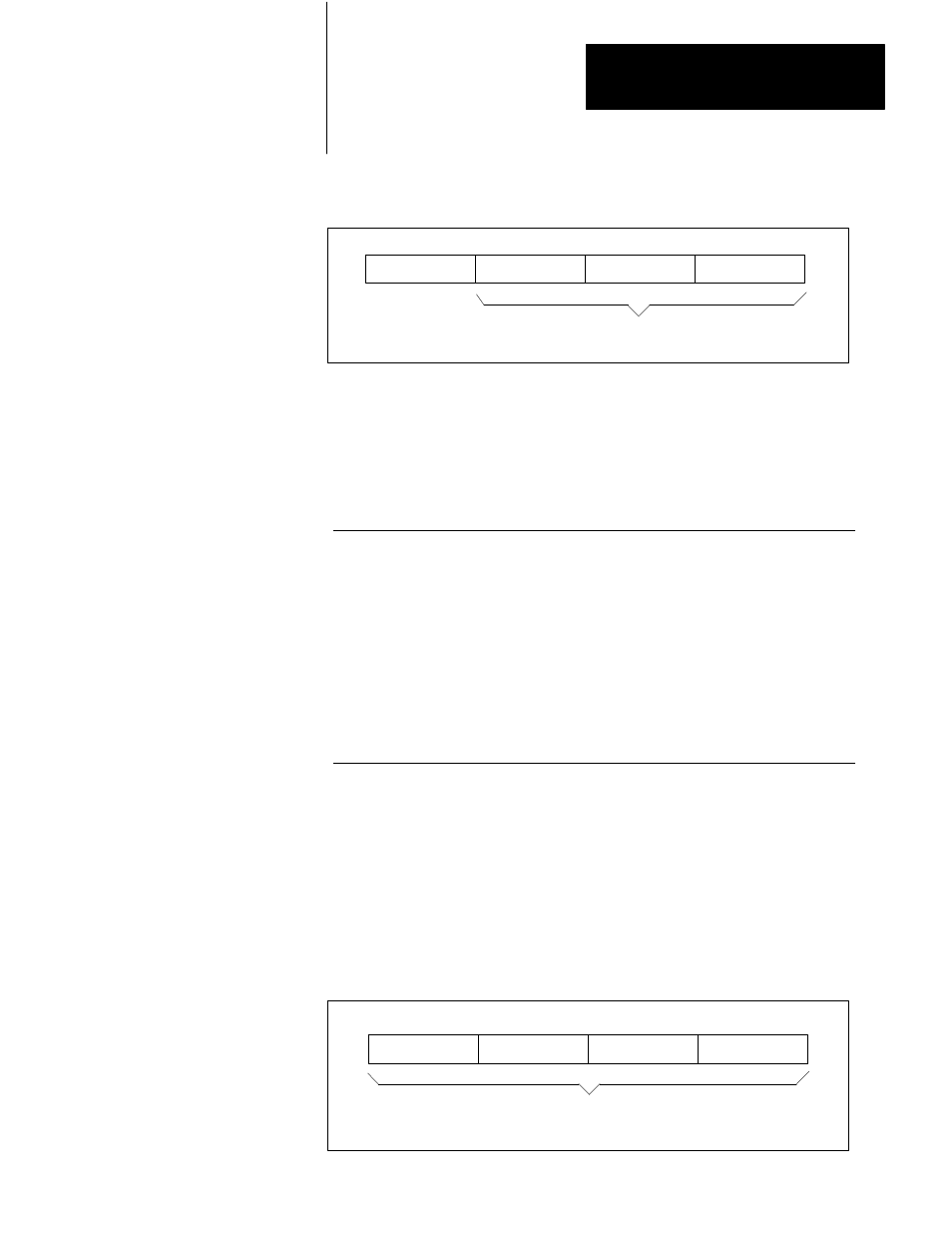
Figure 7.30
Feedforward Gain Word
50073
Feedforward gain,
BCD or binary
0 Ć 99.9%
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
0
0
0
0
Without feedforwarding axis motion does not begin until the following error is
large enough to overcome friction and inertia. The feedforward component
generates a velocity command to move the cylinder almost immediately. This
immediate response keeps the actual position closer to the desired position and
thereby reduces the following error.
Example: Following Error Calculation
If axis movement is 5 ips and proportional gain (K
P
) at that speed is 0.05
ips/mil, then
following error = (5)/(0.05) = 100 mil
A feedforward gain of 50% will reduce the following error to 50 mil
(1 mil = 0.001 inches).
Global Velocity (words 23 and 52)
This parameter is used by setpoints and motion segments that use the global
velocity. The global velocity must not exceed the maximum specified by the
greater of either analog calibration constant.
Figure 7.31
Global Velocity Word
50074
Global velocity,
BCD 99.99 ips or 999.9 mmps max
Binary 327.67 ips or 3276.7 mmps max
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...