Command block, 7ć32, Formatting module data (writes) chapter 7 – Rockwell Automation 1771-QB Linear Pos. User Manual
Page 111: Local acceleration/deceleration, Figure 7.42 local acceleration/deceleration words
Formatting Module Data (WRITES)
Chapter 7
7Ć32
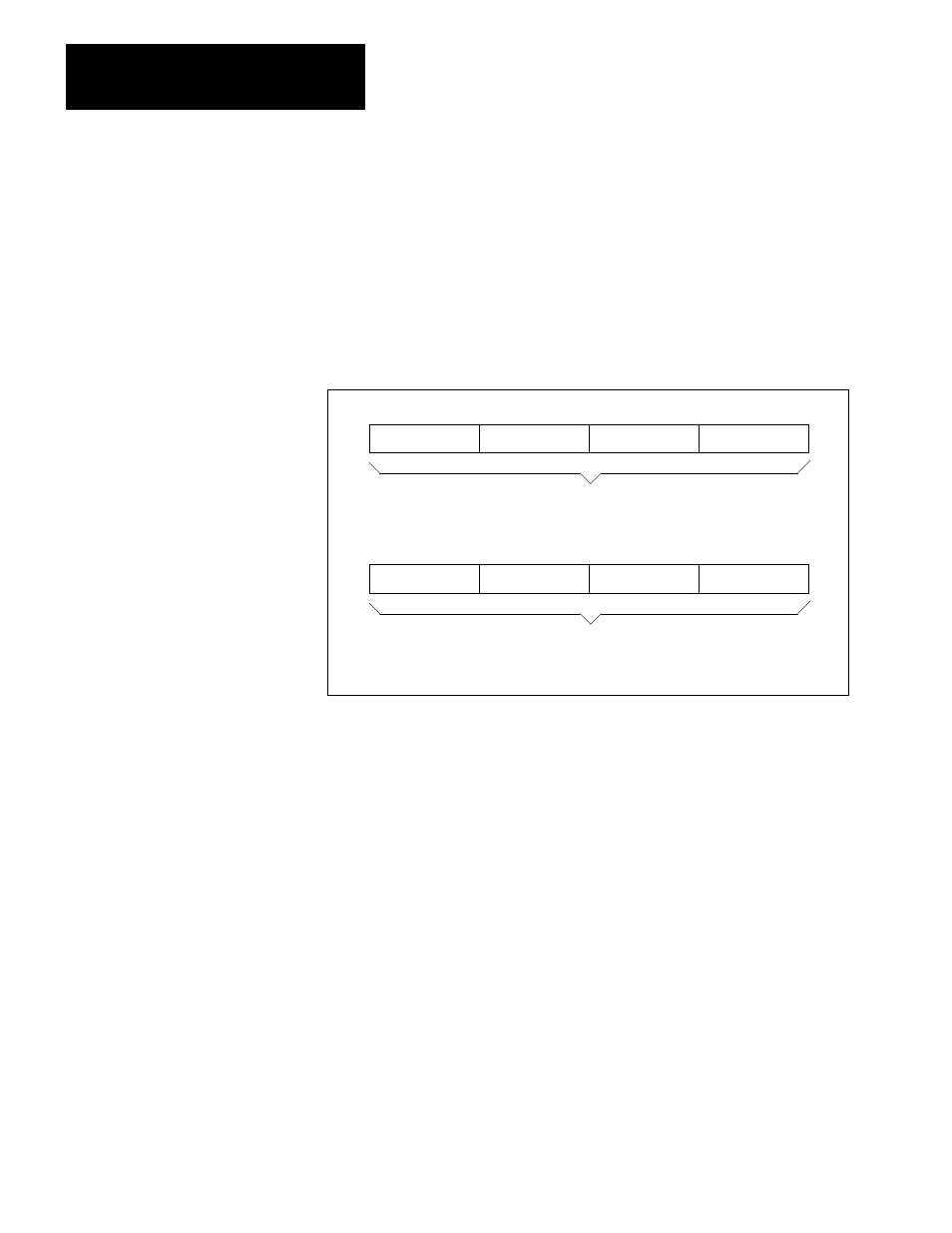
Local Acceleration/Deceleration
The local acceleration and deceleration words define the acceleration and
deceleration you want for the corresponding setpoint move. You can disable
either or both of these parameters by setting them to zero. The module will then
use the global parameter.
Figure 7.42
Local Acceleration/Deceleration Words
50083
Local acceleration rate,
BCD 999.9 ips/s or 9999 mmps/s max
Binary 3276.7 ips/s or 32767 mmps/s max
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
..
.
..
.
...
Local deceleration rate,
BCD 999.9 ips/s or 9999 mmps/s max
Binary 3276.7 ips/s or 32767 mmps/s max
You use the command block to control the module. It contains the words and
bits necessary to initiate axis movement. Optionally, you can command
movement to a 13th setpoint (in auto mode only). The command block contains
two control words and five words defining setpoint 13 for each axis. If you are
controlling one axis, the command block will be seven words long; if you are
controlling two axes, the command block will be 14 words long.
Command Block