Analog signals – MTS SWIFT 20 Ultra Sensor User Manual
Page 32
SWIFT 20 Sensors
32
Low-Profile Transducer Interface
Hardware Overview
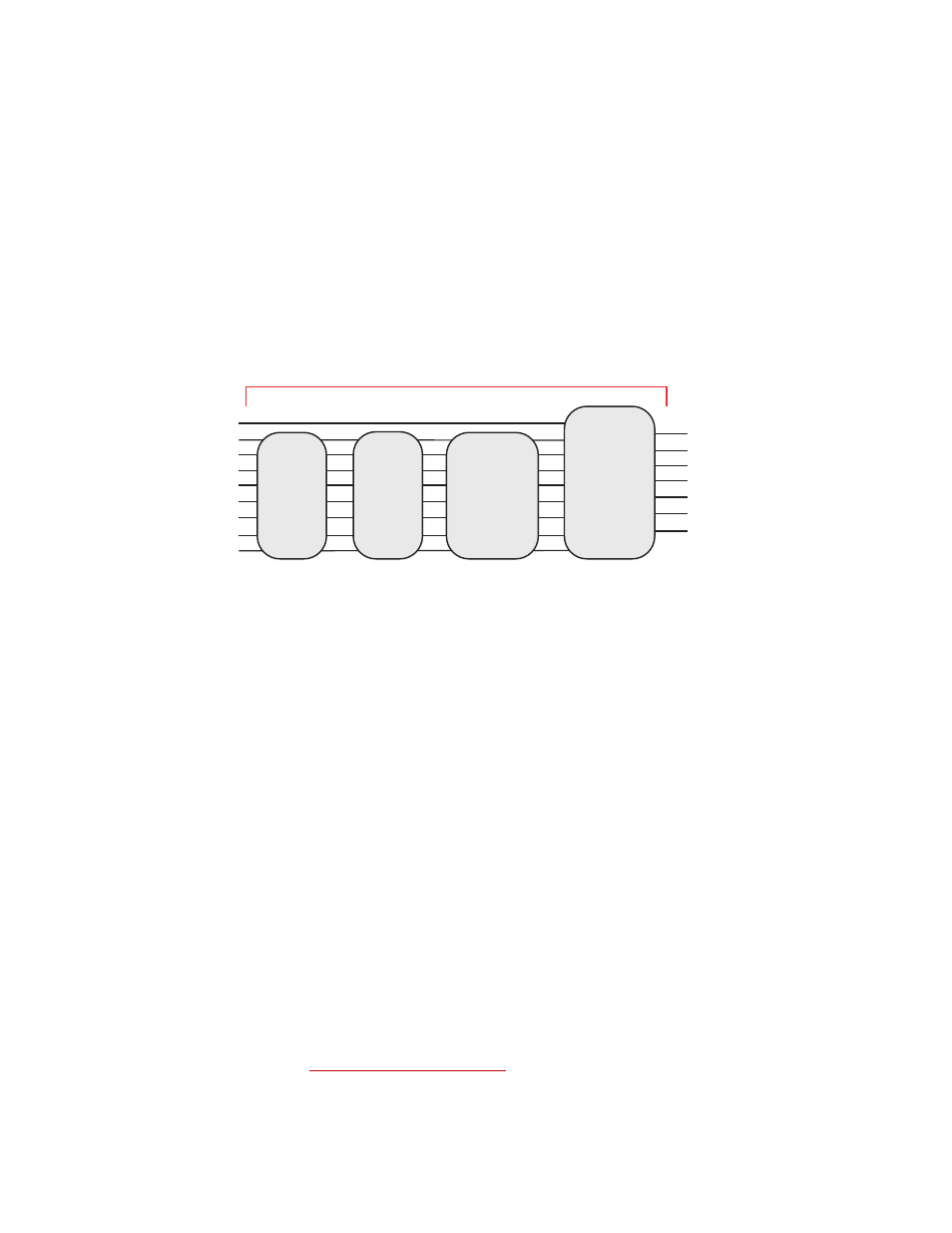
The Low-Profile TI transforms eight inputs (amplified bridge signals) into three
forces and three moments by the following process:
•
Applying a zero offset and scaling the signals
•
Using a geometric matrix to transform the signals into three forces and three
moments in the transducer reference frame
•
Using a cross-coupling matrix calculation to scale and sum the individual
signals into each output
•
In spinning applications, using a rotational transformation to put the forces
and moments into a stationary reference frame
The Low-Profile TI conditions the transducer signals, producing seven analog
output signals proportional to the following values:
•
Longitudinal force (Fx)
•
Lateral force (Fy)
•
Vertical force (Fz)
•
Overturning moment (Mx)
•
Driving/Braking moment (My)
•
Steering moment (Mz)
•
Angle output (
θ)
Analog signals
The force and moment signals are output from the Low-Profile TI in the form of
±10 V
1
full scale analog signals. These signals can be used by any data
acquisition system.
The angle output is an analog voltage that is proportional to angular position. At
0° the output is 0 V. At 360°, the output is 5 V.
Fx1
Fx2
Fy1
Fy2
Fy3
Fy4
Fz1
Fz2
Fx
Fy
Fz
Mx
My
Mz
Geometric
Matrix
Zero and
Scaling
q
Cross
Coupling
Matrix
Rotational
Transformation
q
Inputs
Outputs
Transducer Interface Functions
S20-09
1. Standard from MTS. Other full-scale output voltages can be evaluated and
may be provided at special request.