Low-profile transducer interface, Low-profile transducer interface 31 – MTS SWIFT 20 Ultra Sensor User Manual
Page 31
Low-Profile Transducer Interface
SWIFT 20 Sensors
Hardware Overview
31
Low-Profile Transducer Interface
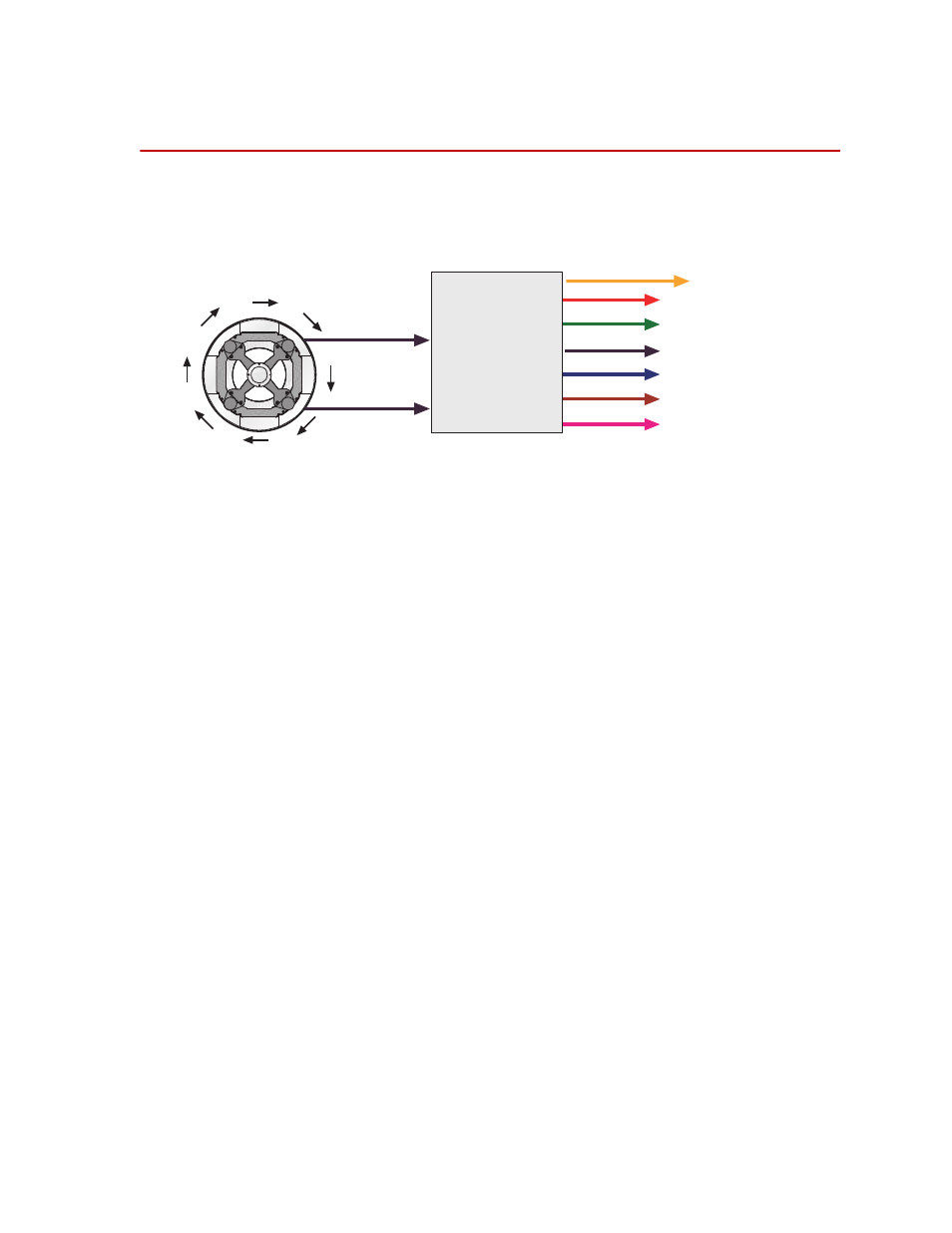
The Low-Profile TI performs cross talk compensation, transforms the loads from
a rotating to a non-rotating coordinate system, and produces an analog output
signal suitable for any data recorder.
Cross talk
compensation
Cross talk occurs when a force is applied to one axis, but a non-real force is
measured on another axis. The SWIFT sensor design has very low inherent cross
talk. The Low-Profile TI compensates for any cross talk by subtracting the non-
real forces when the amount of cross talk is known.
The amount of known cross talk is determined during the calibration process.
Cross talk values will vary slightly for different rims. For example, a steel rim
will have slightly different cross talk errors than a less rigid aluminum rim.
Signal conditioning
The Low-Profile TI is specifically designed to be used for both spinning and non-
spinning applications. The Low-Profile TI performs signal conditioning and
communications functions. The output from the Low-Profile TI is a high-level
signal suitable for input into a multichannel data recorder or an MTS Automated
Site Controller (ASC).
Fx
Fy
Fz
Mz
Mx
My
Transducer
Interface
Output signals
(± 10 Volts)
Angular
Position
Bridge
Outputs
Transducer bridge output
signals and encoder
angular position signal are
sent through slip ring
Transducer Interface
converts signals to non-
spinning vehicle coordinates,
applies calibration gains and
cross talk compensation
Force, moment, and
angle analog signals
are output from
Transducer Interface
q Angle signal
(05 Volts)
S20-08