Slalom curve driving example, Slalom curve driving example 122 – MTS SWIFT 20 Ultra Sensor User Manual
Page 122
SWIFT 20 Sensors
122
Slalom Curve Driving Example
Analyzing SWIFT Data
Slalom Curve Driving Example
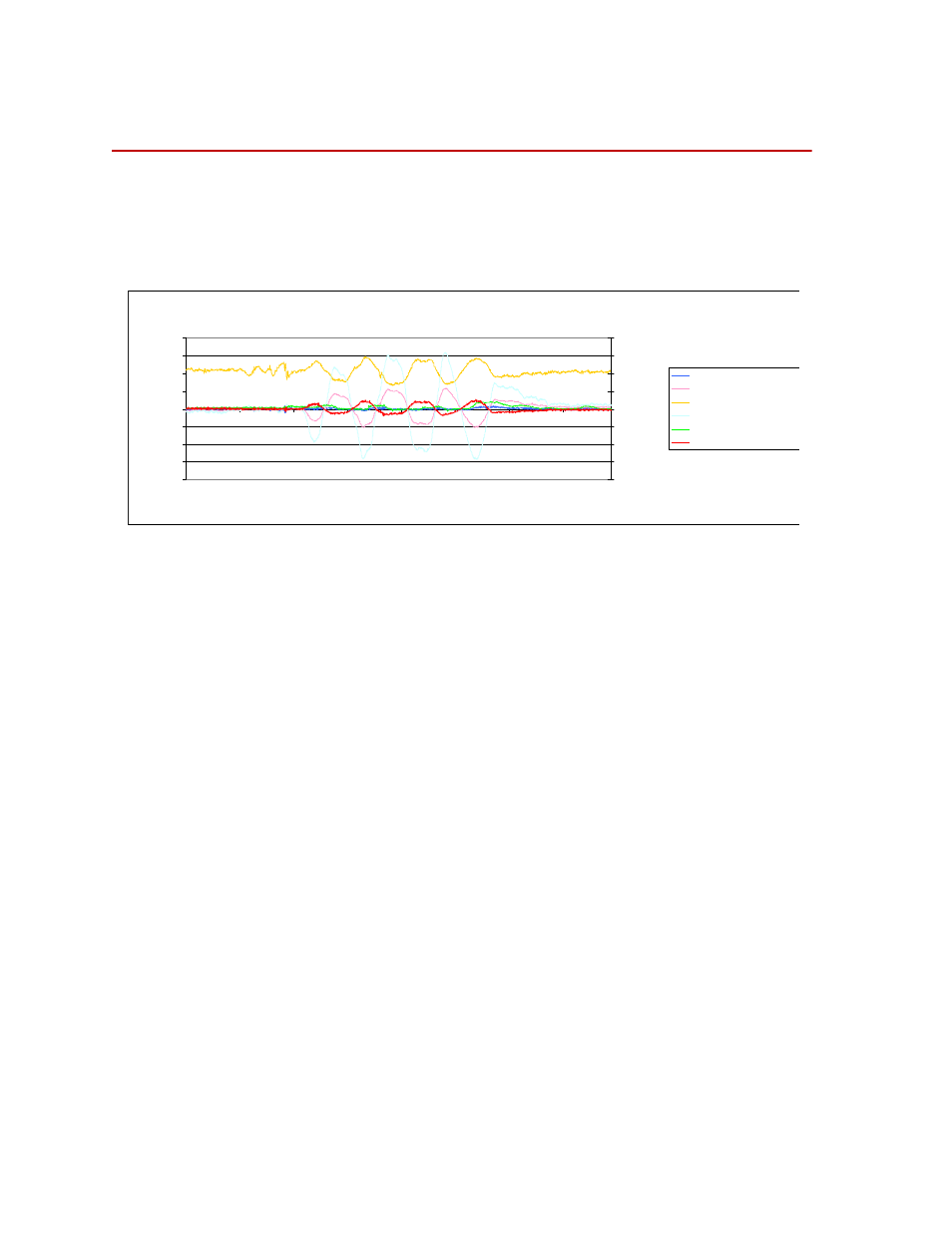
Shown below is actual road data taken with the MTS SWIFT Sensor, located at
the front passenger side of a mid-size passenger vehicle. Data shown is corrected
to translate the forces and moments from the center of the transducer to the center
of the tire.
The outputs from slalom (side to side steering) curve driving can be noted in the
graph above:
Time 4 to 12 seconds shows the steering maneuvers. All other times show
straight driving on an average road surface.
Fx: The tractive force remains relatively constant since no acceleration nor
deceleration is occurring during these driving maneuvers.
Fy: The lateral force can be seen alternating from positive to negative with an
amplitude of roughly 500 lb force as the vehicle changes directions with steering
maneuvers.
Fz: The side to side weight distribution of the vehicle during these steering
maneuvers can be noted in the vertical force outputs. The stationary vertical force
of slightly over 1000 lb as noted above is seen to vary by nearly 400 lb.
Mx: The Mx output noted is corrected to give the overturning moment at the
center of the tire, primarily caused by the lateral force Fy at the rolling radius of
the tire.
My: There is little acceleration or brake torque applied during the steering
maneuvers, as noted in the My output.
Mz: The aligning moments generated from the steering maneuvers can be noted
to be in the order of 1000 in•lb for this particular test.
Slalom Curve Driving
-2000
-1500
-1000
-500
0
500
1000
1500
2000
0
2
4
6
8
10
12
14
time in seconds
O
ut
put
-
Lbs
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
Ou
tp
u
t- In
-L
b
s
Fx (tractive force) - Lbs
Fy ( lateral force) - Lbs
Fz (normal force) - Lbs
Mx (overturning moment) - In-
My (wheel torque) - In-Lbs
Mz (aligning torque) -In-Lbs