Coordinate system, Coordinate system 23 – MTS SWIFT 20 Ultra Sensor User Manual
Page 23
Coordinate System
SWIFT 20 Sensors
Hardware Overview
23
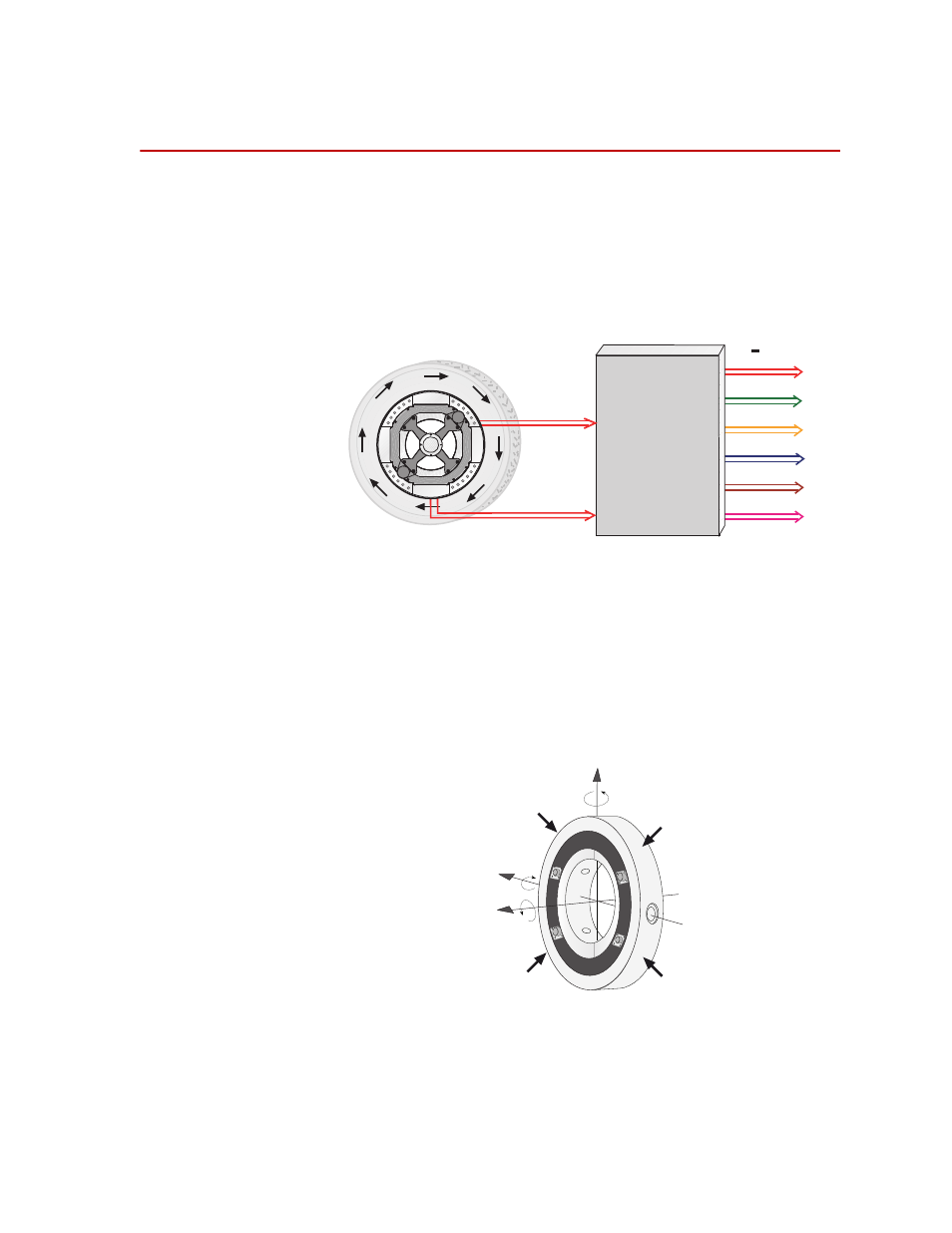
Coordinate System
In the transducer, independent strain gage bridges measure forces and moments
about three orthogonal axes. The signals are amplified to reduce the signal-to-
noise ratio. An encoder signal indicates angular position, which is used to
convert raw force and moment data from the rotating transducer to a vehicle-
based coordinate system. The force and moment and encoder information is sent
to the transducer interface (TI).
The TI performs cross talk compensation and converts the rotating force and
moment data to a vehicle coordinate system. The result is six forces and moments
that are measured at the spindle: Fx, Fy, Fz, Mx, My, and Mz. A seventh (angle)
output is available for tire uniformity information, angular position, or to
determine wheel speed (depending on the data acquisition configuration).
The coordinate system shown below was originally loaded into the TI settings by
MTS. It uses the right-hand rule.
The SWIFT coordinate system is transducer-based, with the origin located at the
center of the transducer. The lateral offset of the transducer is illustrated in the
reference drawings at the end of this manual. Positive loads are defined as
applied to the outer ring of the transducer.
Fx
Fy
Fz
Mz
Mx
My
Transducer
Interface
Output signals
+ 10 Volts
Angular
Position
Bridge
Outputs
S20-06
+Mz
+Fz
+Fy
+My
+Mx
+Fx
Forces acting on outer ring
S20-07