Closed-loop speed control, 1 analog act. value, 2 digital act. value – Lenze 8615E User Manual
Page 77
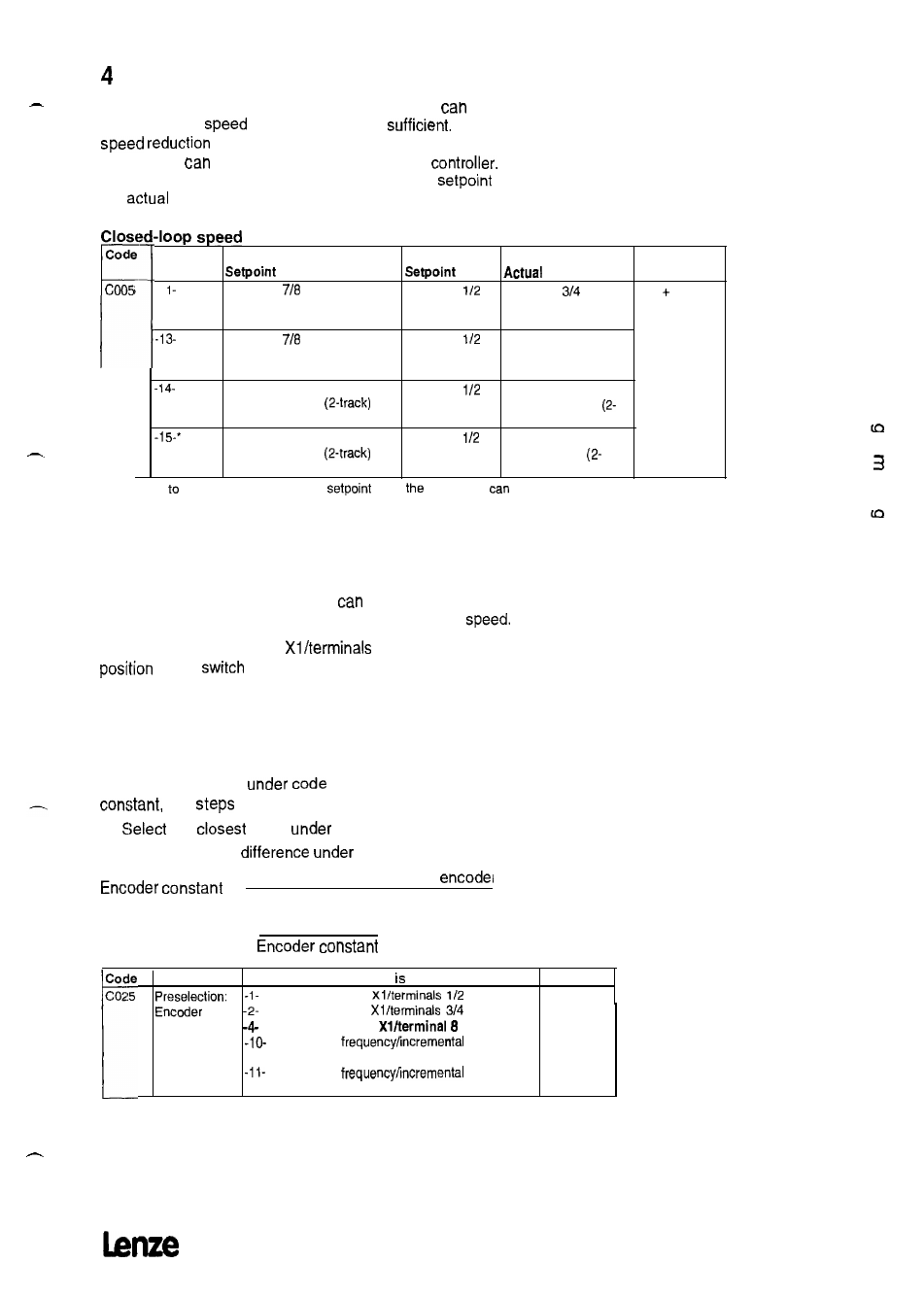
Closed-loop speed control
For a
number of applications, the accuracy which
be obtained
with open-loop
control is
often not
To avoid
a
which occurs when an asynchronous motor is
loaded, you
select a configuration with a
Pl
The
appropriate configuration depends on the way of
input and
the
value input you want to use.
control:
Code
Parameter Meaning
Acceptance
1
2
value
-1
Terminals
(bipolar) or
Terminals
Terminals
[SH PRG]
LECOM (bipolar) or keypad
(bipolar)
analog act. value
(bipolar)
Terminals
(bipolar) or
Terminals
Input X5
LECOM (bipolar) or keypad
(bipolar)
Digital frequency (2-
1
(bipolar)
track)
l
Input X8
Terminals
Input X5
Digital frequency
(bipolar)
Digital frequency
track)
Input X5
Terminals
Input X8
Digital frequency
(bipolar)
Pulse encoder
track)
* According
the configuration selected,
1 or
act. value
be
output via the digital frequency output XQ.
4.1
Analog act. value
If
you
use a DC tachogenerator, you should know the maximum
tacho voltage to be expected. You
calculate this tacho voltage
from the ratings of the tacho and the maximum drive
Connect the tacho to input
3, 4, and select the
of the
SI, which is required for the maximum tacho
voltage (see page 31).
4.2
Digital act. value
If you use an incremental encoder for act. value, first select the
input for this encoder
CO25. To enter the encoder
two
are necessaty in general:
l
the
value
C026.
l
Compensate the
C027.
=
Pulses per revolution of the
Pole pair number of the motor
Adjustment (C027) =
Constant (C026)
N a m e
Parameter
(Factory setting
printed in bold)
Acceptance
Analog input
SH + PRG
Analog input
Analog input
Digital
encoder
input X5
Digital
encoder
input X8
75