Functional description, 12 library network – HP EML E-series Tape Libraries User Manual
Page 28
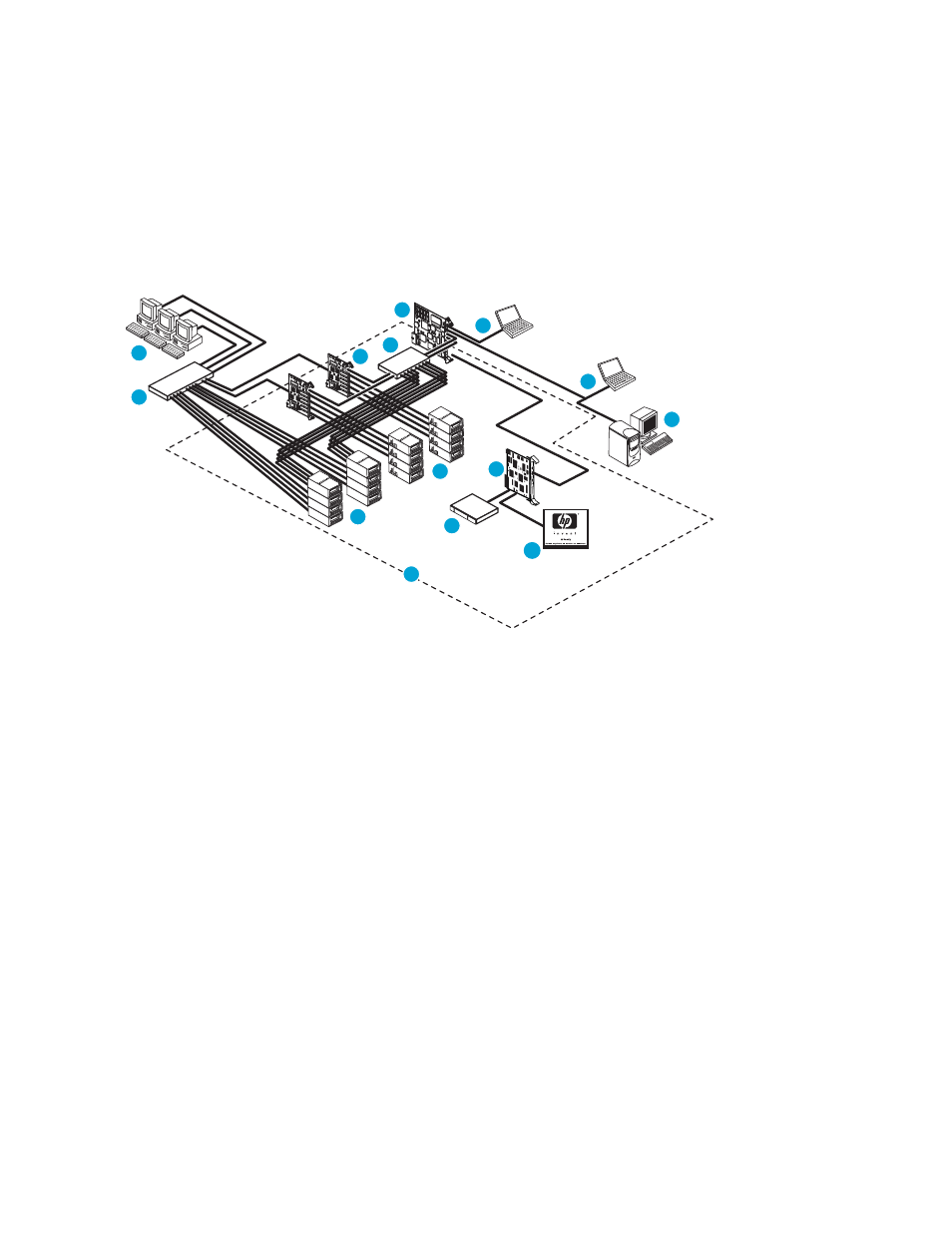
Functional description
The library receives commands and data throughout the SAN from hosts running applications from
approved independent software vendors (ISVs). Host bus adapters (HBAs) in servers send this traffic over
FC links, usually through FC switches. For LTO4 tape drives, the traffic goes directly to the tape drive;
but for LTO2 and LTO3 tape drives, the traffic first goes through an interface controller. One interface
controller can connect up to four LTO2 or LTO3 tape drives. For all libraries, regardless of whether they
contain LTO2 and LTO3 or LTO4 tape drives, at least one interface controller is required to pass tape
cartridge changer (robotics) commands to the Interface Manager card over a private network. The
Interface Manager card passes these SCSI commands on to the library robotics controller over the private
network, taking advantage of the error handling and retry capabilities of TCP/IP.
1
2
7
11
10
14
9
6
8
3
4
5
13
12
11612
1
Hosts
8
OCP
2
FC switch (SAN)
9
Serial connection
3
Interface controller
10
Telnet connection
4
Interface Manager card
11
Management station
5
LTO3 tape drives
12
Library boundary
6
Library robotics controller
13
LTO4 tape drives
7
Robot
14
Switch for the internal
network
Figure 12 Library network
In addition to receiving traffic from the interface controllers, the Interface Manager card receives
command and diagnostic requests over an Ethernet connection from three other possible sources. The
majority of requests come from a management station where Command View TL software resides. The
other two sources are through a Telnet session or a serial interface. The Interface Manager card works in
the background to manage library functions. It configures the interface controllers to direct commands
from host systems to the appropriate LTO2 or LTO3 tape drive or to the library robotics controller.
The library robotics controller receives commands over an internal private network and from the OCP.
It manages robotics movement, monitors the door and load port sensor status, and stores library
information in volatile memory.
28
Library overview