NORD Drivesystems BU0500 User Manual
Page 77
5 Parameters
BU 0500 GB-1013
77
P104
Minimum frequency
(Minimum frequency)
P
0.0 ... 400.0 Hz
{ 0.0 }
The minimum frequency is the frequency supplied by the FI as soon as it is enabled and no
additional setpoint is set.
In combination with other setpoints (e.g. analog setpoint of fixed frequencies) these are added to
the set minimum frequency.
This frequency is undershot when
a. the drive is accelerated from standstill.
b. The FI is blocked. The frequency then reduces to the absolute minimum (P505) before
it is blocked.
c.
The FI reverses. The reverse in the rotation field takes place at the absolute minimum
frequency (P505).
This frequency can be continuously undershot if, during acceleration or braking, the function
"Maintain frequency" (Function Digital input = 9) is executed.
Pos : 108 /Anleit ungen/5. / 6. Parametrier ung [BU 0500 / BU 0200]/ Par ameter/ P100-P199Par ameter P105 – M axi mal e Fr equenz @ 0\ mod_1327575060751_388. doc x @ 7596 @ @ 1
P105
Maximum frequency
( Maximum frequency)
P
0.1 ... 400.0 Hz
{ 50.0 }
The frequency supplied by the FI after being enabled and once the maximum setpoint is present,
e.g. analog setpoint as per P403, a correspondingly fixed frequency or maximum via the
ControlBox.
This frequency can only be overshot by the slip compensation (P212), the function "Maintain
frequency" (function digital input = 9) or a change to another parameter set with lower maximum
frequency.
Pos : 109 /Anleit ungen/5. / 6. Parametrier ung [BU 0500 / BU 0200]/ Par ameter/ P100-P199Par ameter P106 – R ampenverr undungen @ 0\ mod_1327575116954_388. doc x @ 7619 @ @ 1
P106
Ramp smoothing
(Ramp smoothing)
P
0 ... 100 %
{ 0 }
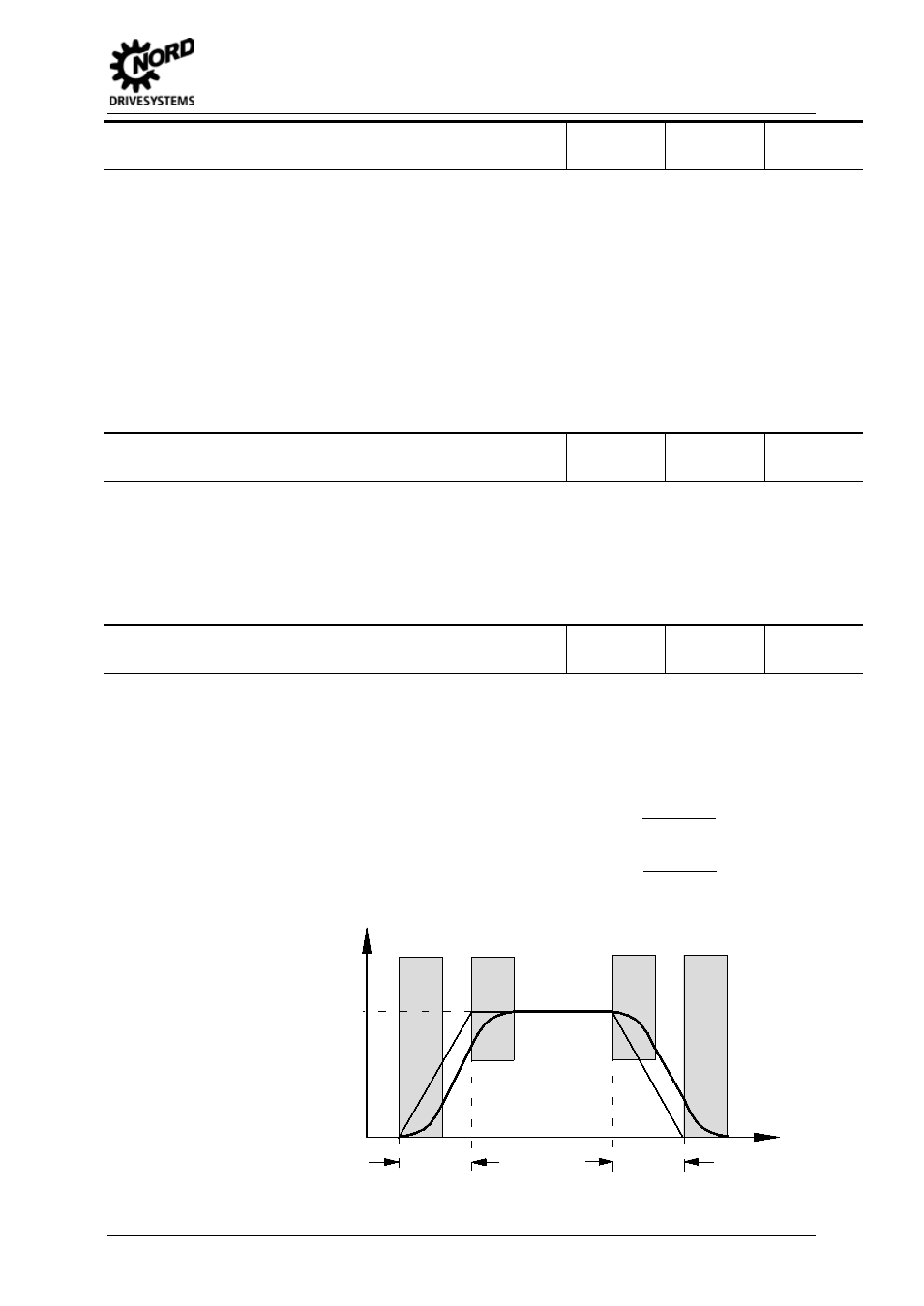
This parameter enables a smoothing of the acceleration and deceleration ramps. This is
necessary for applications where gentle, but dynamic speed change is important.
Ramp smoothing is carried out for every setpoint change.
The value to be set is based on the set acceleration and deceleration time, however values <10%
have no effect.
The following then applies for the entire acceleration or deceleration time, including rounding:
[ ]
100%
%
P106
t
t
t
P102
P102
TIME
ON
ACCELERATI
tot
×
+
=
[ ]
100%
%
P106
t
t
t
P103
P103
TIME
ON
DECELERATI
tot
×
+
=
P102
P103
Output
frequency
Setpoint
frequency
Time
Currently
10 – 100% from P102
Currently
10 – 100% from P103