11 colour and contact assignments for encoders, Colour and contact assignments for encoders, 2 assembly and installation – NORD Drivesystems BU0500 User Manual
Page 59: Encoder counting direction, Rotary encoder function test
2 Assembly and installation
BU 0500 GB-1013
59
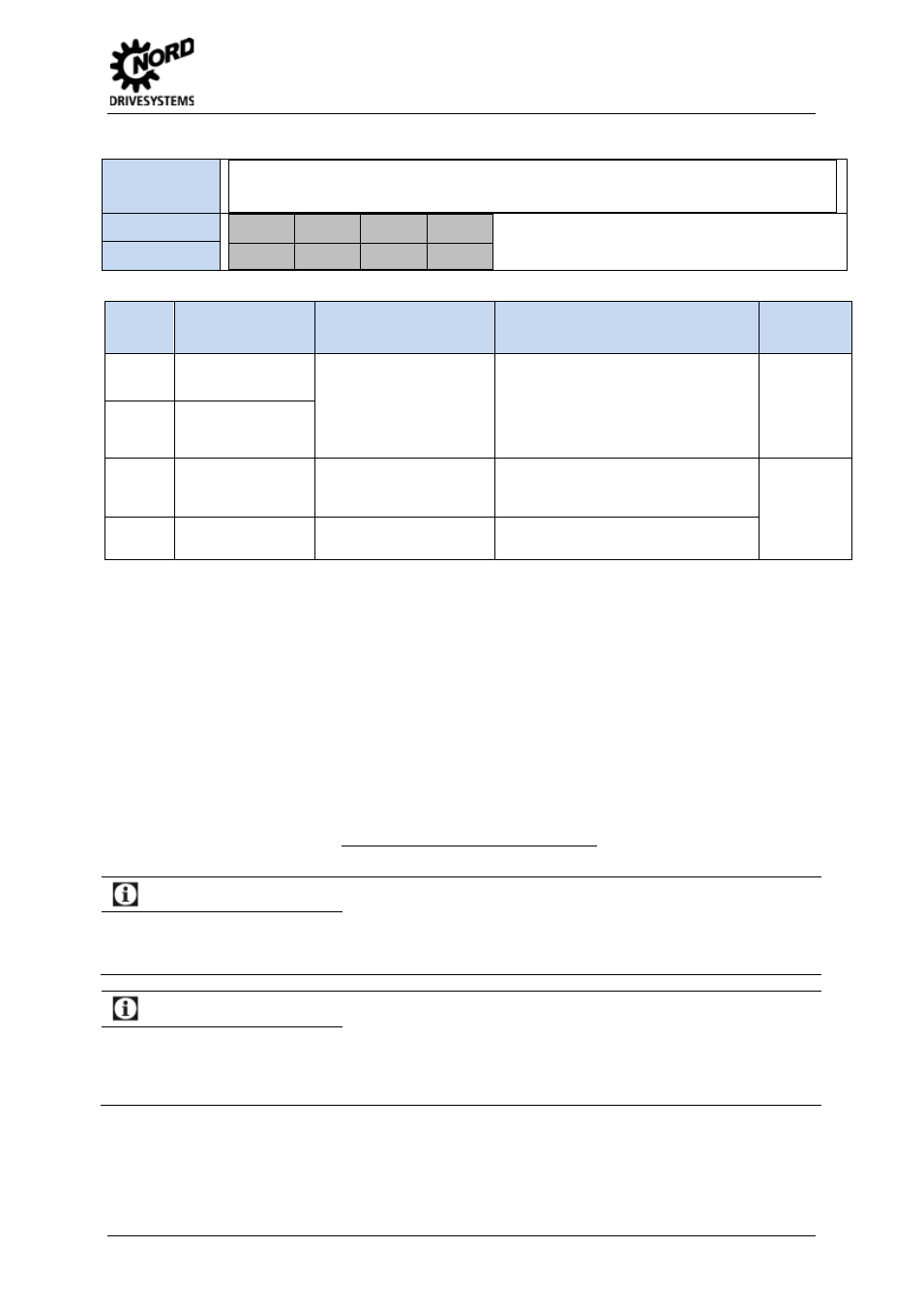
Terminal block X15 – motor PTC and 24V input (above size 8)
Relevance
SK 500E
SK 505E
SK 510E
SK 511E
SK 515E
SK 520E
SK 530E
SK 535E
√
√
Terminals X15:
38
39
44
40
T1
T2
VI 24V
GND
Name
Terminal Function
[factory setting]
Data
Description / wiring suggestion
Parameter
38
Thermistor input +
EN 60947-8
On: >3.6 kΩ
Off: < 1.65 kΩ
Measurement voltage 5 V
at R <
4 kΩ
The function cannot be switched off, set
a jumper if no PTC is present.
39
Thermistor input -
44
Voltage supply input
24V … 30V
min. 3000mA
Voltage supply for the FI control unit. Is
essential for the function of the
frequency inverter.
40
Reference potential
for digital signals
GND/0V
Reference potential
Pos : 79 /Anl eitungen/ Elektroni k/FU und Start er/ 2. M ont age und Ins tall ati on/ 2. 11 F arb- und Kontaktbel egung für Dr ehg eber [ BU 0500] @ 0\ mod_1325865982124_388. doc x @ 6147 @ 2 @ 1
2.11 Colour and contact assignments for encoders
The incremental encoder connection is an input for a type with two tracks and TTL-compatible signals
for EIA RS 422-compliant drivers. The maximum current consumption of incremental encoders must
not exceed 150 mA.
The pulse number per rotation can be between 500 and 8192 increments. This is set with the normal scaling via parameter
P301 "Incremental encoder pulse number" in the menu group "Control parameters". For cable lengths > 20 m and motor speeds
above 1500 rpm the encoder should not have more than 2048 pulses/revolution.
For longer cable lengths the cable cross-section must be selected large enough so that the voltage
drop in the cable is not too great. This particularly affects the supply cable, in which the cross-section
can be increased by connecting several conductors in parallel.
Unlike incremental encoders, for sine encoders or SIN/COS encoders the signals are not in the form
of pulses, but rather in the form of sine signals (shifted by 90°).
Note
Encoder counting direction
The counting direction of the incremental encoder must correspond to that of the motor. Therefore, depending on
the rotation direction of the encoder to the motor (possibly reversed), a negative number must be set in parameter
P301.
Note
Rotary encoder function test
The voltage difference between tracks A and B can be measured with the aid of parameter P709 [-09] and [-10]. If
the incremental encoder is rotated, the value of both tracks must jump between -0.8V and 0.8V. If the voltage only
jumps between 0 and 0.8V the relevant rack is faulty. The position can no longer be determined via the
incremental encoder. We recommend replacement of the encoder!
Pos : 80 /Anl eitungen/ Elektroni k/FU und Start er/ 2. M ont age und Ins tall ati on/ 2. 11 F arb- und Kontaktbel egung für Dr ehg eber- I nkrement algeber [ SK 5xxE] @ 1\ mod_1331216115763_388.doc x @ 17854 @ 5 @ 1