Chapter 4 system i/o signals compatible mode, Chapter 4, System i/o signals compatible mode – Denso RC5 User Manual
Page 89
69
Chapter 4
System I/O Signals
Compatible Mode
4.1
Types and Functions of System Output Signals (Compatible
Mode)
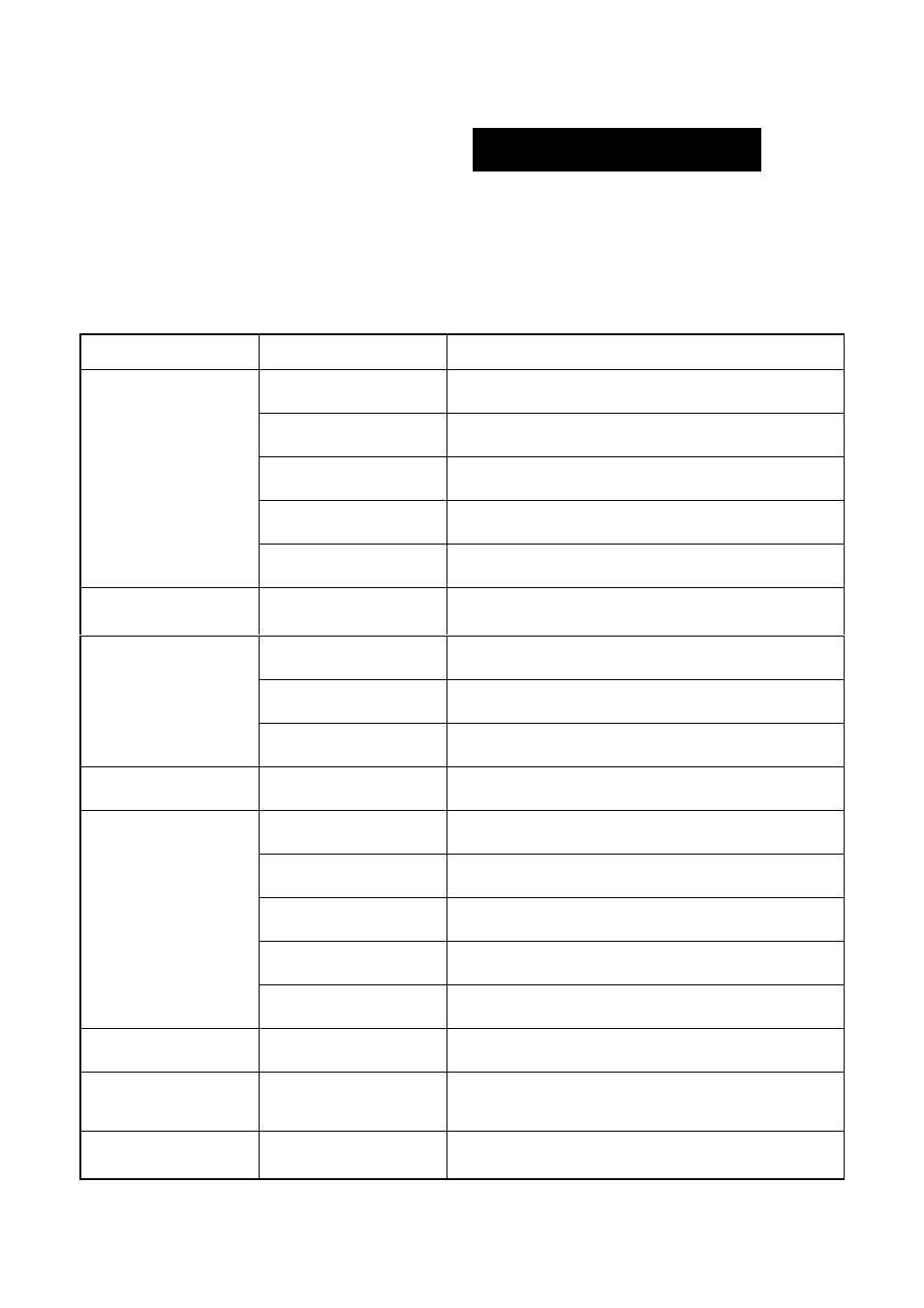
The table below lists the system output signals used in the compatible mode.
Types and Functions of System Output Signals to be Used in Compatible Mode
Application
Signal name
Function
Robot power ON
complete
Outputs when preparations for operation are ready
to start.
Auto mode
Outputs when the robot is in auto mode.
Servo ON
Outputs when the power to the motor is turned ON.
CAL complete
Outputs when calibration is completed.
Start-up
External mode
Outputs when the robot is in external mode.
Program
pre-execution check
Teaching
Outputs when the robot is in manual or teach check
mode.
Program start reset
Outputs when execution of the program starts in
response to the program start signal received.
Robot-in-operation
Outputs when the robot is in operation (the program
is being executed).
Program execution
Continue start
permitted
Outputs when the continue start is permitted.
Program end
Single cycle end
Outputs when the program completes a cycle.
Normal CPU
Outputs when the CPU (hardware) of the Robot
Controller is normal.
Robot failure
Outputs when a failure (such as a servo failure and
program error) occurs in the robot.
Robot warning
Outputs when a slight error occurs.
Dead battery warning
Outputs when the voltage of the encoder backup
battery or memory backup battery lowers.
Error/warning
Error No.
An error number will be outputted in BCD code if an
error occurs.
Continue start
Continue start permitted
Outputs when Continue Start is enabled.
Safe start function
SS mode
Outputs when the robot is in SS mode. Refer to the
SETTING-UP MANUAL, Chapter 3, Subsection 3.4.6
"SS (Safe Start) Function."
Emergency stop
Emergency stop
Outputs from a contact exclusively designed for an
emergency stop circuitry.