Types and general information about i/o signals, Standard mode, 1 standard – Denso RC5 User Manual
Page 42: Mode, 3 types and general information about i/o signals, 1 standard mode
22
2.3 Types and General Information about I/O Signals
This section describes the I/O signals for the Robot Controller.
The I/O signals are grouped into user I/O signals and system I/O signals.
User I/O signals are compatible with conventional signals, including the pin
pattern, in compatible mode. Note that the connector pin meanings are different
between standard mode and compatible mode. Some of the signal lines used
for user I/O in compatible mode are used for system input in standard mode.
Additionally, part of the signal lines used for system I/O in compatible mode is
used for command execution I/O signals in standard mode.
2.3.1 Standard Mode
In standard mode, 30 input points for command execution are used to direct
program start and other instructions as I/O commands.
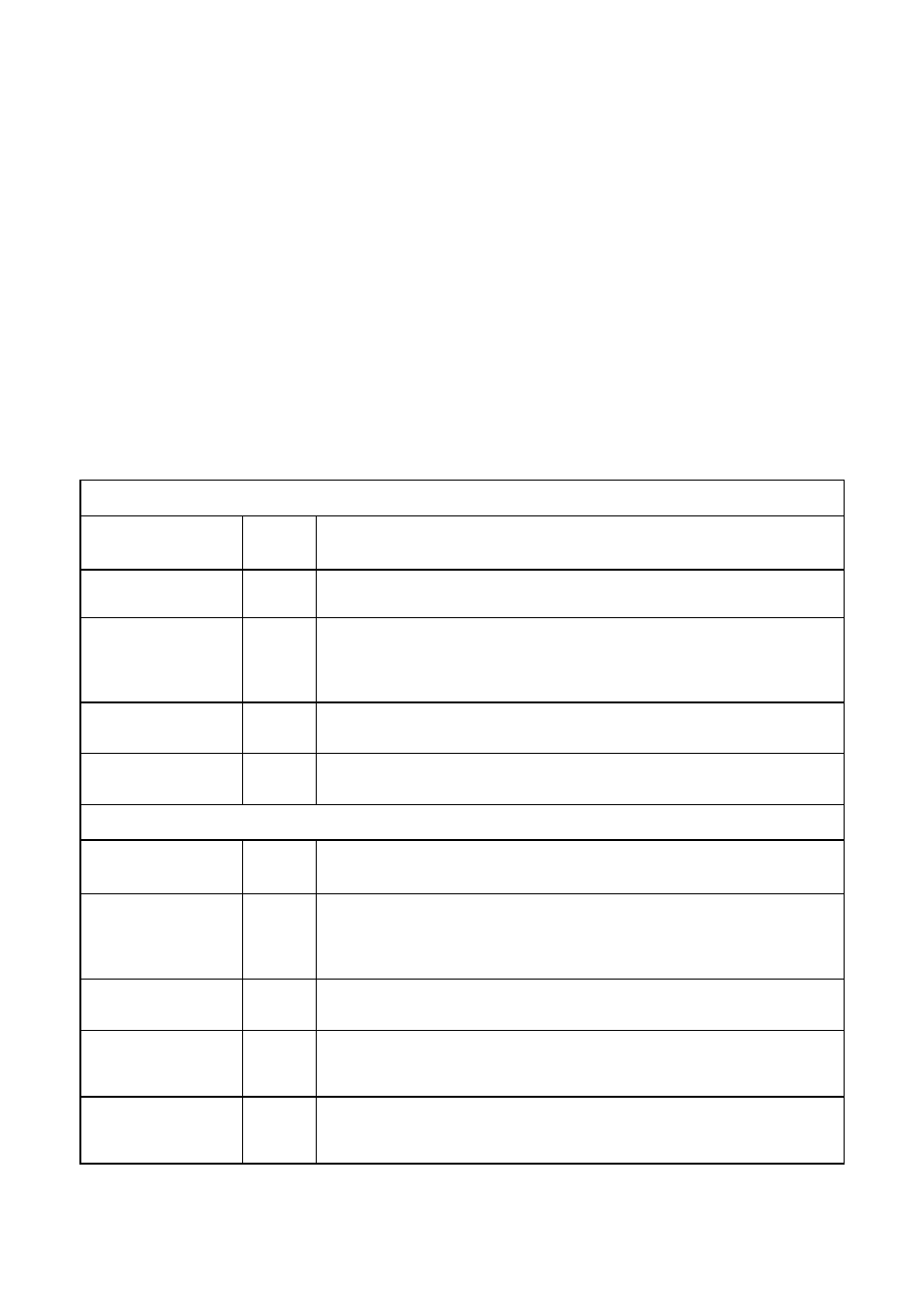
The table below lists the types of I/O signals used in standard mode.
Types of System I/O Signals Used in Standard Mode
Fixed by system
Type
No. of
points
Function
System input
5
Robot stop, Enable Auto, interrupt skip, instantaneous stop (all tasks),
step stop (all tasks)
System output
12
Robot initialization complete, automatic operation mode, external mode,
servo ON, robot-in-operation, normal CPU, robot failure, robot warning,
dead battery warning, continue start permitted, SS mode, emergency
stop
Input for command
execution
30
Command (4 bits) data area 1 (8 bits), data area 2 (16 bits), odd parity
bit, strobe signal
Output for command
execution
18
Command processing complete, status area (16 bits), odd parity bit
Controlled by user program
Type
No. of
points
Function
User input
12
Inputs to read the external I/O status with an IN command or IO [ ]
variable.
Used for analysis condition identification, condition satisfaction wait, data
input from the external device, etc.
User output
24
Outputs to issue a signal to the external device during program execution
with a SET command, RESET command, etc.
Hand input
8
Inputs to read the external I/O status with an IN command or IO [ ]
variable.
Used to confirm the end-effector check status, etc.
Hand output
8
Outputs to issue a signal to the external device with a SET command,
RESET command, etc.
Used to control the opening and closing of the end-effector.