Compatible mode, 2 compatible, Mode – Denso RC5 User Manual
Page 43: 2 compatible mode
23
2.3.2 Compatible Mode
In the compatible mode, the input and output points are arranged in disregard
of compatibility with conventional VS series robots.
The table below lists the types of I/O signals used in compatible mode.
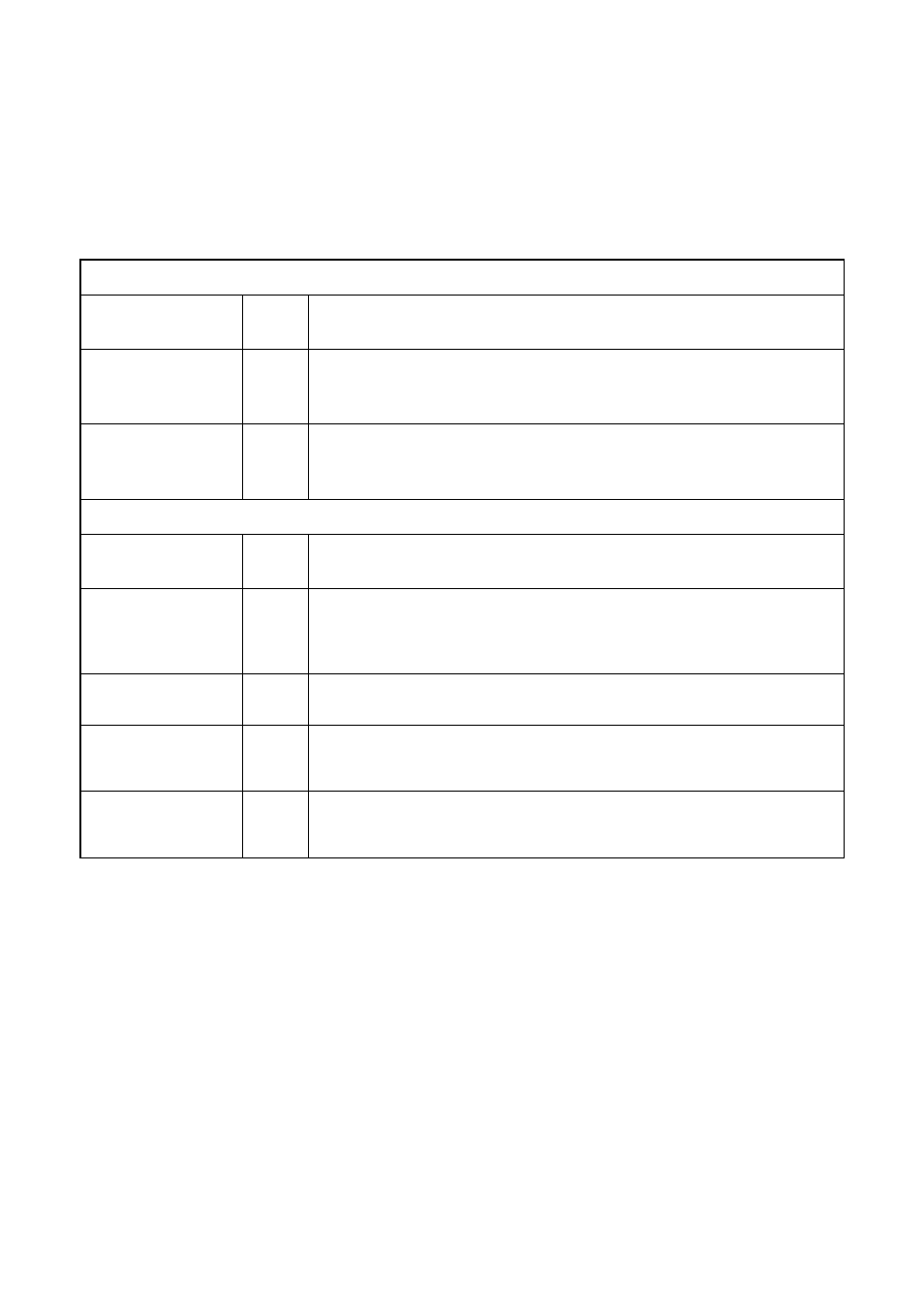
Types of I/O Signals Used in Compatible Mode
Fixed by system
Type
No. of
points
Function
System input
22
Inputs to turn ON the power to the robot from the external device (PLC),
start CAL or select and start a program instead of operations by the
operating panel or teach pendant.
System output
27
Outputs to inform the external device (PLC) of the robot status, such as
robot-in-operation or occurrence of an error.
Controlled by user program
Type
No. of
points
Function
User input
25
Inputs to read the external I/O status with an IN command or IO [ ]
variable.
Used for analysis condition identification, condition satisfaction wait, data
input from the external device, etc.
User output
24
Outputs to issue a signal to the external device during program execution
with a SET command, RESET command, etc.
Hand input
8
Inputs to read the external I/O status with an IN command or IO [ ]
variable.
Used to confirm the end-effector check status, etc.
Hand output
8
Outputs to issue a signal to the external device (valve) with a SET
command, RESET command, etc.
Used to control the opening and closing of the end-effector.