Denso RC5 User Manual
Page 77
57
3.5.3.4
Error Read (0100)
(1) Function
This command outputs the existing error number to the status area.
This command is output to the status area only when the strobe signal
remains ON.
Caution: This command will not be output if a minor error occurs, such
as a program selection error, caused by the operation of the
teach pendant or the operating panel.
(2) Format
Command area (4 bits, input)
0100
Data area 1 (8 bits, input)
Nothing will be input.
Data area 2 (16 bits, input)
Nothing will be input.
Status area (16 bits, output)
The existing error code will be output.
(3) Hexadecimal codes
Refer to the figure given below.
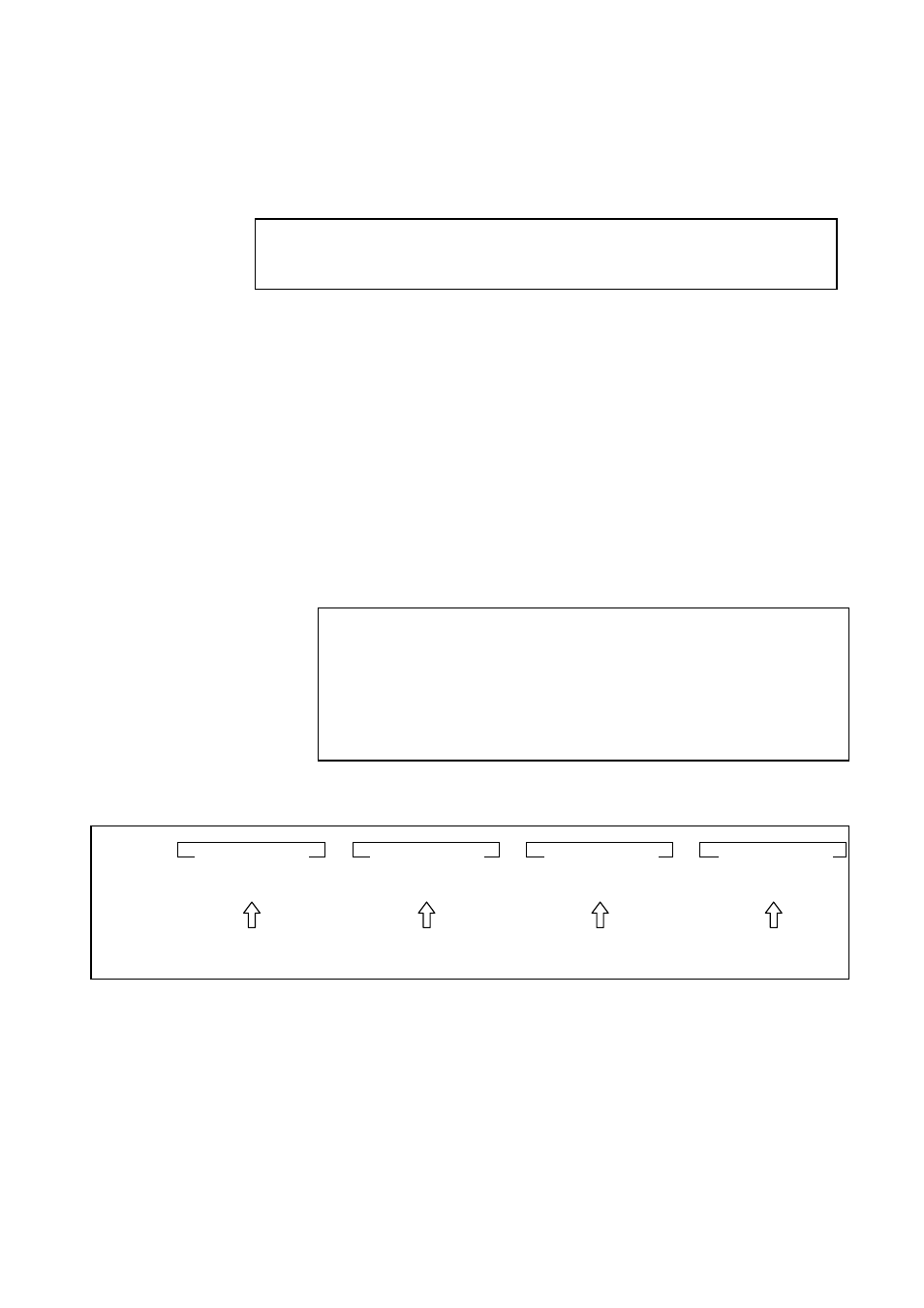
The following figure shows an example of error number output when
ERROR6174 (overload error with the fourth axis) occurs.
Example of Error Number Output
(4) Description
If a command is executed when a robot failure or the robot warning signal
is output, the error number, which caused the robot failure or robot
warning signal to be output, will be output to the status area.
If no error exists after an error has been cleared, 0 will be output to the
status area. Also, when there is an error that does not output any robot
failure or robot warning signal, 0 will be outputted.
ЧЧЧЧ
→
0
Ч
¡
Ч
¡
→
5
¡
Ч
¡
Ч →
A
ЧЧЧ
¡
→
1
Ч
¡¡
Ч →
6
¡
Ч
¡¡
→
B
ЧЧ
¡
Ч
→
2
Ч
¡¡¡
→
7
¡¡
ЧЧ →
C
ЧЧ
¡¡
→
3
¡
ЧЧЧ →
8
¡¡
Ч
¡
→
D
Ч
¡
ЧЧ
→
4
¡
ЧЧ
¡
→
8
¡¡¡
Ч →
E
¡
⋅⋅⋅
ON
¡¡¡¡
→
F
×⋅⋅⋅⋅
OFF
Terminal No.
(Connector CN10)
28 27 26 25
Ч Ч Ч
¡
Hundreds of error No.
1
24 23 22 21
×
¡ ¡ ¡
Tens of error No.
7
20 19 18 17
Ч
¡
Ч Ч
Units of error No.
4
32 31 30 29
Ч
¡ ¡
Ч
Thousands of error
6
ERROR