8 block parameter summary – Flowserve 3400IQ Digital Positioner User Manual
Page 62
Logix 3400IQ Digital Positioner FCD LGENIM3402-00 – 0/07
2
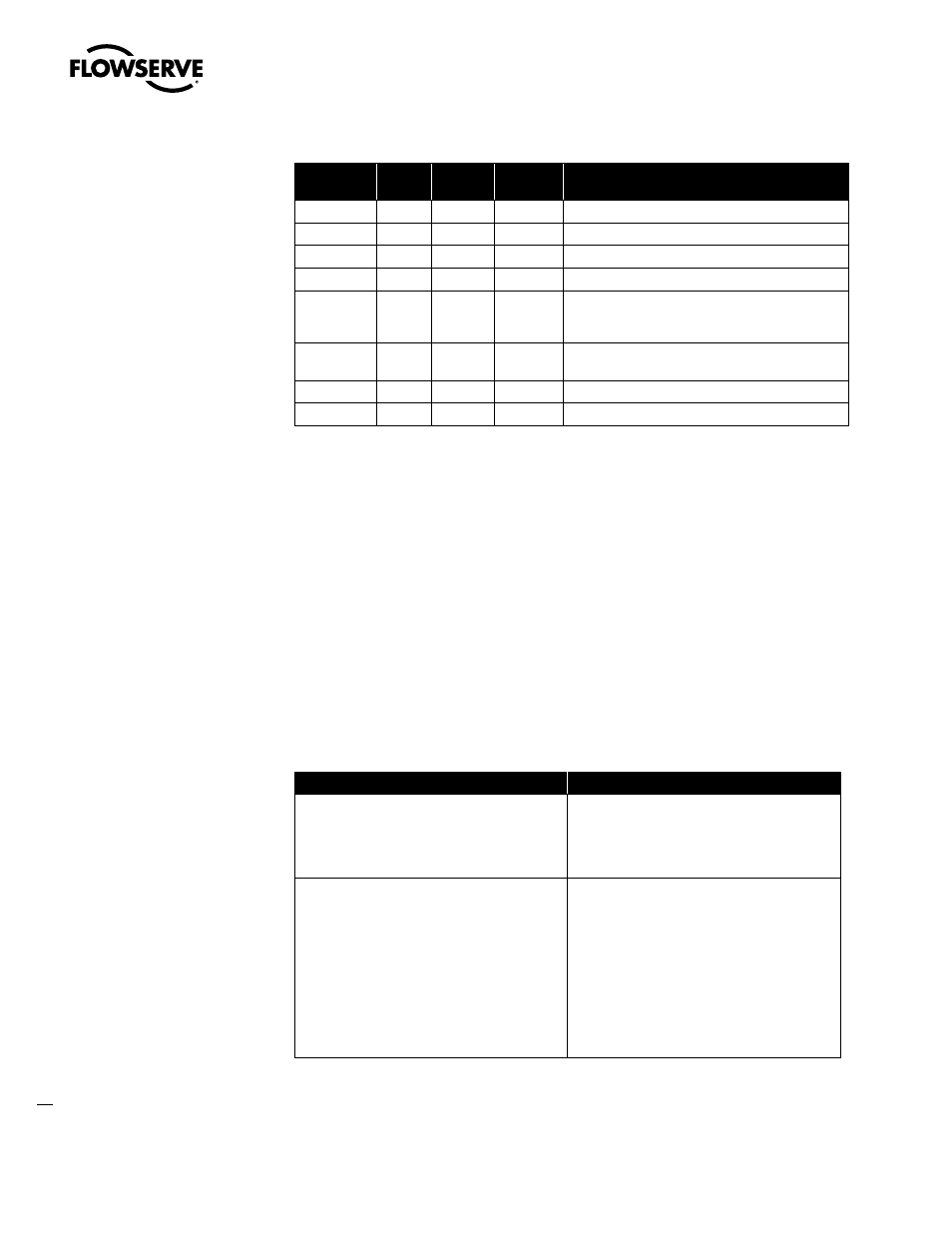
Table 8.10 PID Tuning Parameter Values
Parameter
Initial
Value
Minimum
Value
Maximum
Value
Comment
PV_FTIME
0
0
200
Units: seconds.
GAIN
0
.004
250
GAIN_NLIN
0
.004
250
RATE (sec.)
0
32 • Ts
7500
The value of ZERO is permitted to turn off rate action.
RESET (sec.)
+INF
2 • Ts
7500
The value of +INF is permitted to turn off reset action.
(Some versions of NI-FBUS Configurator program
cannot set +/- INF)
OUT_LAG
Ideal PID
N/A
N/A
N/A
Fixed for ideal PID form - cannot be configured.
Robust PID
0
2• Ts
7500
Zero permitted, which implies no output lag.
BAL_TIME
0
N/A
N/A
Not used in Honeywell Implementation.
Mode-restricted Writes to PID Parameters
Writing to certain PID block parameters are restricted by the block’s TARGET and/or ACTUAL mode.
The MODE_BLK.TARGET or MODE_BLK.ACTUAL parameter must equal one of the modes in the
‘Write Restrictions Column’ in Table 8.8 before the user can write values to the parameters listed.
Note: Do not select anything in CONTROL_OPTS in order to set the PID action to reverse acting.
8.8 Block Parameter Summary
Table Description
Table 8.11 provides a description of the block parameter attributes that are listed in the Block
Parameter Summary, Table 8.14 to Table 8.17.
Table 8.11 Table Description for Block Parameter Summary
Column Title Attribute
Meaning
Obj Type Object Type
Object type for the parameter value:
S - Simple Variable
R - Record
A - Array of simple variables
Data Type/Structure
Data Type or Structure for the parameter value:
1. Data Types consist of a simple variable or array
and are: Unsigned8, Unsigned16 Unsigned32 - An
unsigned variable of 8, 16 or 32 bits.
Float - Floating point variable.
2. Data Structures consist of a record which may
be: Value and Status - float - Value and status of a
floating point parameter.
Scaling - Static data used to scale floating point
values for display purposes.