10 internal positioner issues, Table 10.12 symptom chart – Flowserve 3400IQ Digital Positioner User Manual
Page 114
Logix 3400IQ Digital Positioner FCD LGENIM3402-00 – 0/07
4
Table 10.12 Symptom Chart
Failure or Problem
Probable Cause(s)
Refer to Section(s)
LEDs
LED four blink sequence begins with
green
1. Any sequence beginning with a green
light is a normal operating mode .
1. Go to Section 7.9 in the Logix 3400IQ
IOM
LED four blink sequence begins with
yellow
1. Any sequence starting with a yellow
light indicates that the unit is in a special
calibration or test mode, or that there
was a calibration problem.
1. Go to Section 7.9 in the Logix 3400IQ
IOM
LED four blink sequence begins with
red
1. Any sequence starting with a red
light indicates that there is an operatio-
nal problem with the unit
1. Go to Section 7.9 in the Logix
3400IQ IOM
Advanced Features
Will not display pressure readings.
1. Is configuration set to advanced?
1. See Standard vs. Advanced Dia-
gnostics in Section 10.
MPC will not function.
1. Is lower soft limit >= 0%. 2. Set-
point should be 1 percent hysteresis
around MPC.
1. See MPC in Section 8.
10.10 Internal Positioner Issues
Positioner Inner loop Control and Tuning
Setting P+I Parameters: Using the configurator, the user can set individual tuning parameters. To use
the Auto Tune feature of the Logix 3400IQ refer to section 7.4 in the Logix 3400IQ IOM. A few key
points are mentioned below.
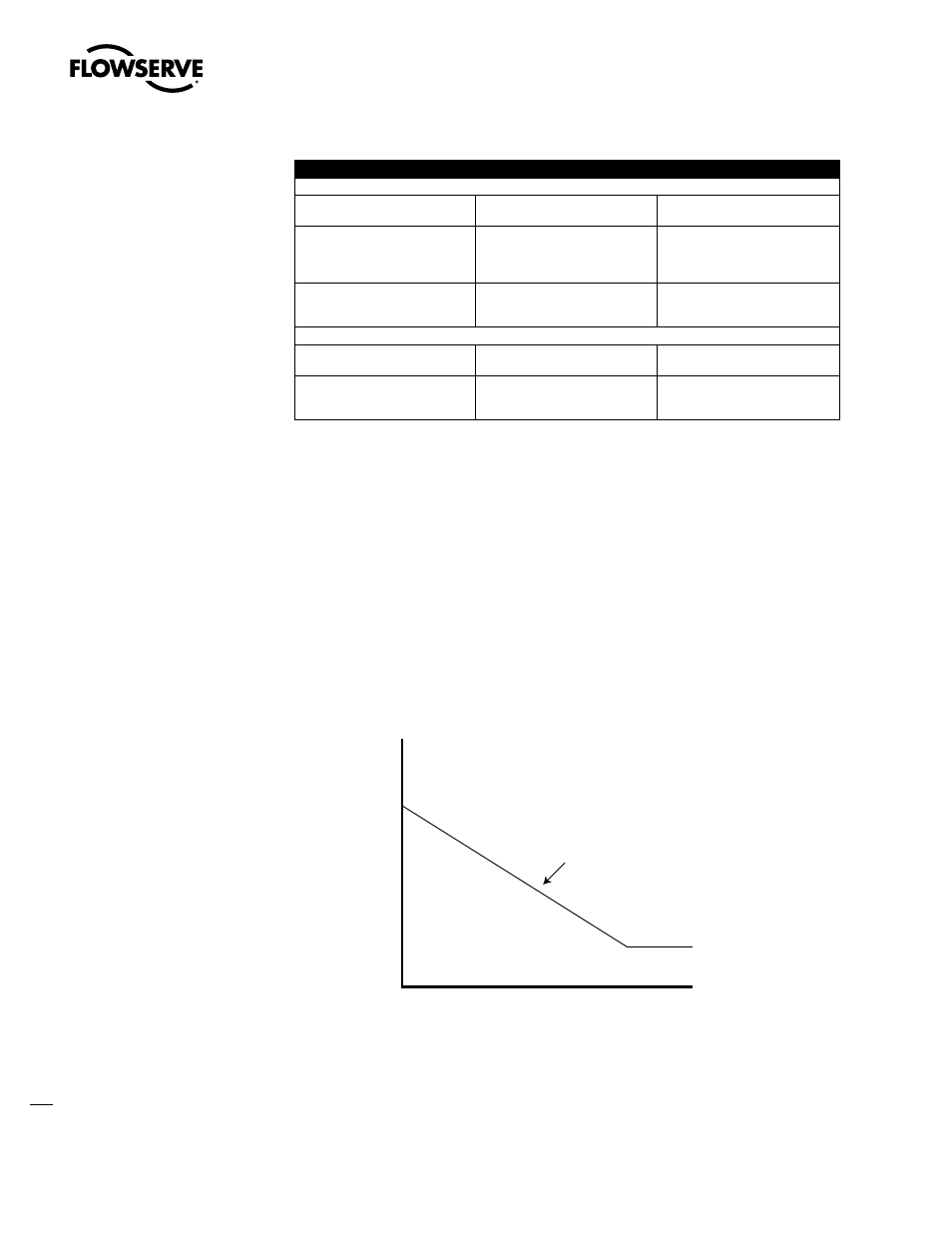
GAIN_UPPER, GAIN_LOWER and GAIN_MULT: These three parameters are related by the following
formula.
Proportional gain = maximum gain - | deviation | x gain multiplier
If proportional gain < minimum gain, then proportional gain = minimum gain
Figure 10.2 Gain Effect Diagram
This algorithm allows for quicker response to smaller steps yet stable control for large steps. (Refer
to Figure 10.2.) Setting the gain multiplier to zero and max gain = min gain results in a typical fixed
proportional gain.
The higher the gain multiplier, the larger the required deviation before the gain increases. Default
values upon initiating a reset to the factory defaults are maximum gain= 2.0, minimum gain = 1.0,
s
p
e
t
S
e
g
r
a
L
s
p
e
t
S
ll
a
m
S
| deviation |
Minimum Gain
(GAIN_LOWER)
Maximum Gain
(GAIN_UPPER)
Pr
opo
rtional Gain
Gain Multiplier
(Determines Slope)
(GAIN_MULT)