Brookfield DV-III Ultra Rheometer User Manual
Page 125
Brookfield Engineering Laboratories, Inc.
Page 125
Manual No. M/98-211-B0104
Brookfield Engineering Laboratories, Inc.
Page 125
Manual No. M98-211-E0912
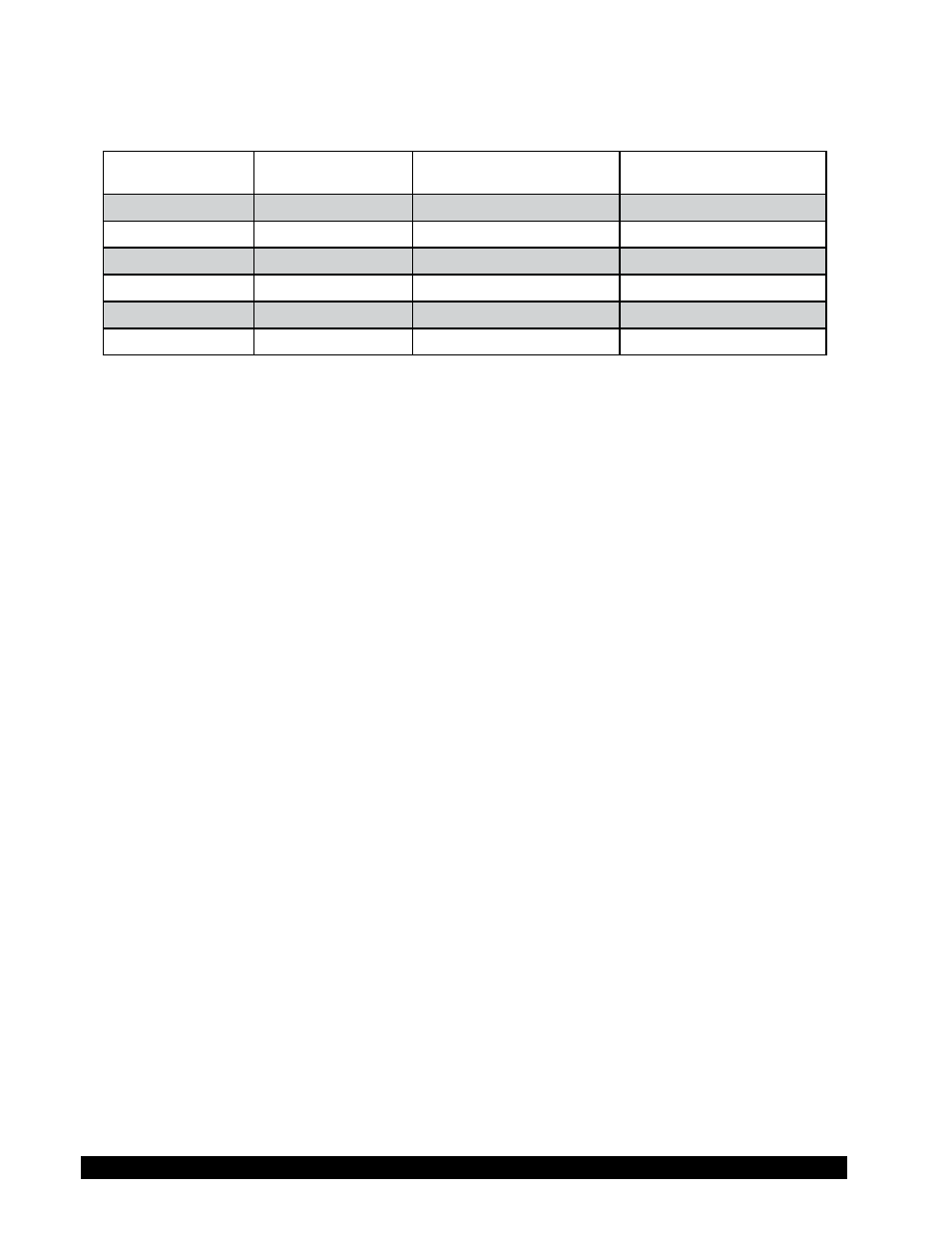
The command set used to communicate with the DV-III Ultra is as follows:
Table I-1
COMMAND
FORMAT FROM HOST
RESPONSE FROM
RHEOMETER
DESCRIPTION
E(nable)
<E>
<E>
Enable control circuitry
R(etrieve)
<R>
<R>
Retrieve data
V(elocity)
<V>
<V>
Send speed
I(dentify)
<I>
<I>
Z(ero)
<Z>
<Z>
Zero instrument
Illegal String
<????>
<ss>
Invalid command
Where:
qqqq =
Transducer reading as 4 hex digits. The instrument should yield a reading of approximately
0400H after zeroing at rest. Calculate % torque as follows:
% Torque = tval/100
Where
tval is the decimal equivalent of the received torque packet.
zzzz
=
Transducer reading representing the % torque zero offset as 4 hex digits. Calculate the
decimal equivalent of the zero offset as follows:
Zero offset = tval/100
Where
tval is the decimal equivalent of the received zero offset packet. This value should
now be subtracted from all future % torque readings retrieved using the R command.
tttt
=
Temperature reading as 4 hex digits. Calculate temperature in °C as follows:
Temperature (°C) = (tval - 4000)/40
Where
tval is the decimal equivalent of the received temperature packet.
vvvvv =
Stepper motor speed as 5 hex digits. The motor speed command from the Host is in
units of RPM. To create a speed packet, multiply the desired decimal speed by 100 then
convert the result to hexadecimal. All packets must be 5 characters long so for packets
with less than that, pad the left side with zeros.
Example: To run the rheometer at 10 rpm
10 rpm x 100 = 1000 decimal = 3E8 hexadecimal;
padding with zeros results in 003E8 so the command sent would be V003E8
ss
=
Status Byte as 2 hex digits. (See Table I-3)
dddd =
The ASCII characters "DV3+".