Rockwell Automation 2099-BMxx Kinetix 7000 High Power Servo Drive User Manual User Manual
Page 128
128
Rockwell Automation Publication 2099-UM001D-EN-P - December 2012
Chapter 5
Configure and Startup the Kinetix 7000 Drive System
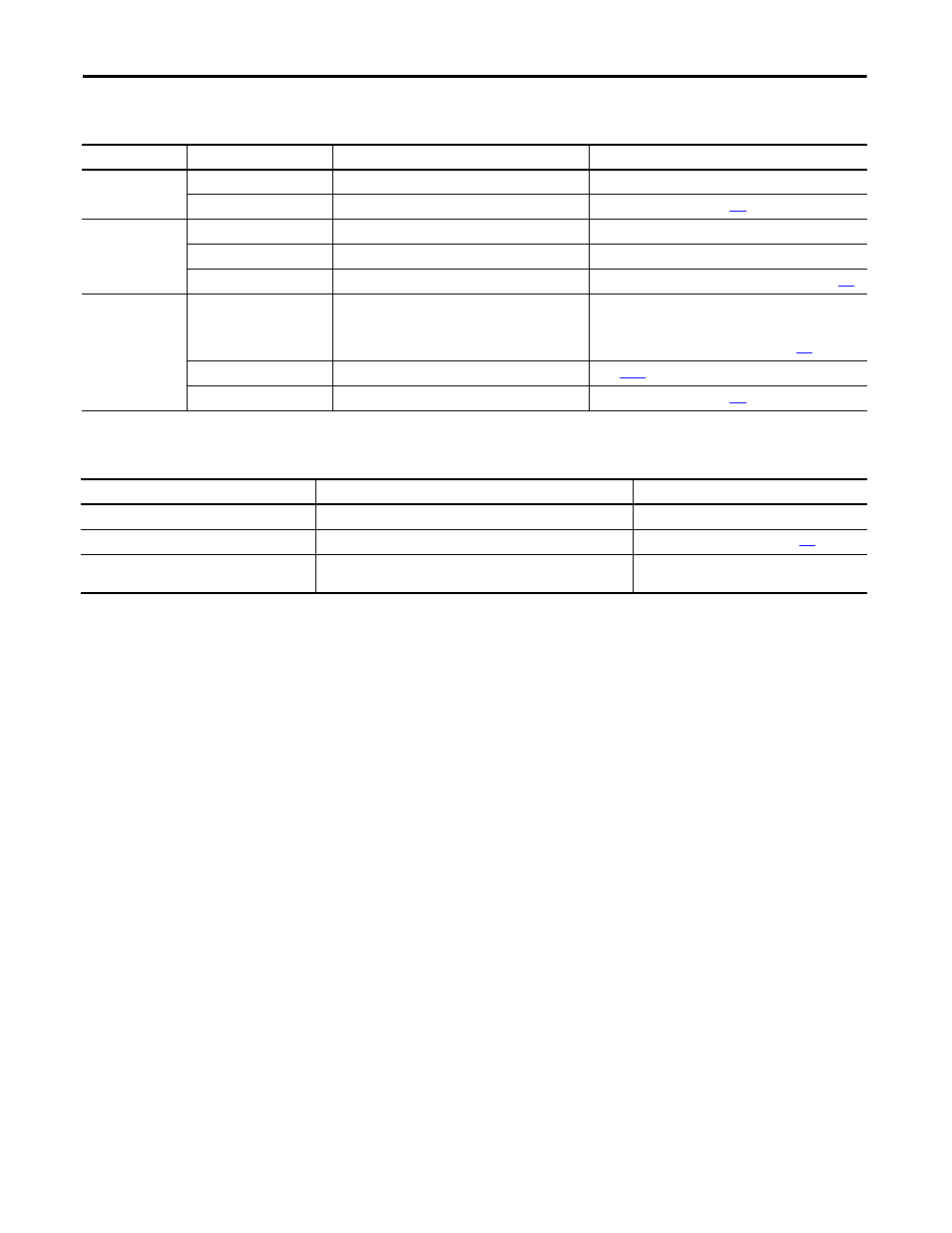
5. Observe the three status indicators on the front of the drive.
6. Observe the three SERCOS status indicators on the SERCOS module.
Status Indicator
Condition
Status
Do This
Drive
Off
Normal condition
Observe the Comm status LED.
Steady red
Drive is faulted
Go to Status Indicators on page
Comm
Flashing green
Establishing communication with network
Wait for steady green.
Steady green
Communication is ready
Observe the Bus status LED
Off
No ring present
Go to Interpret Error Codes and Status Indicators on page
.
Bus
Steady green
Axis is enabled when status should be disabled
1. Verify Hardware Enable Input (IOD-2) is open.
2. Verify MSO instruction is not commanded in RSLogix 5000
software.
3. Return to Apply Power to the Drive on page
Flashing green
(1)
Bus is up, axis is disabled (normal status)
Go to
step 6
.
Off
DC bus is not present
Go to Status Indicators on page
(1) The follower drive has a 2.5 second delay after DC bus voltage is applied before the Bus Status LED begins flashing. This provides the common bus leader time to complete precharge.
SERCOS Status Indicators
Status
Do This
Flashing green and red
Establishing communication
Wait for steady green on all three LEDs.
Steady green
Communication is ready
Go to Test and Tune the Axes on page
Not flashing green and red/
not steady green
SERCOS module is faulted
Go to the appropriate Logix manual for specific
instructions and troubleshooting.