Rockwell Automation 1734-IE4S POINT Guard I/O Safety Modules User Manual User Manual
Page 118
118
Rockwell Automation Publication 1734-UM013J-EN-P - July 2014
Chapter 6
Configure the Module for a SmartGuard Controller
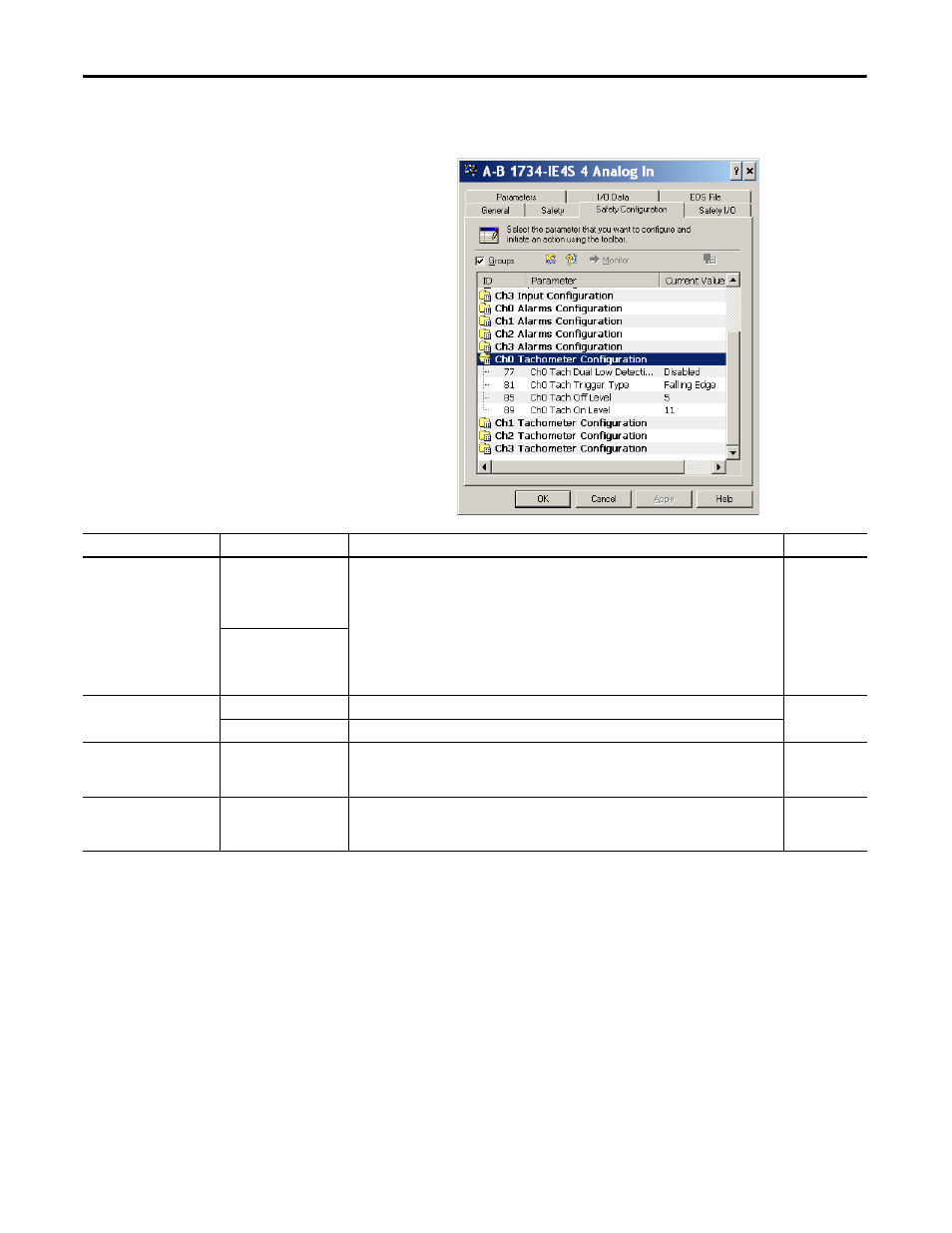
6. Double-click each Channel Tachometer Configuration group to display
parameters for editing.
Parameter Name
Value
Description
Default
Tach Dual Low Detection
On
To increase the diagnostic coverage of your speed sensing loop, you need to determine whether the
two tachometer sensors you are using to sense speed are shorted together. That is, you need to be
able to detect a channel-to-channel fault. One method is to implement two tachometer sensors so
that, during normal operation, their pulse trains are never low at the same time. When Dual Low
Detection is enabled, the module detects this condition as a fault, indicating that the two sensors
are shorted together.
To use this feature, you must use Channels 0 and 1 together, and Channels 2 and 3 together.
Channels 0 and 1 have the same setting and channels 2 and 3 have the same setting. Both channels
in the pair must use tachometer mode and the dual low detection diagnostic.
Disabled
Off
Tach Trigger Type
Falling edge (NPN)
Non-inverted input signal.
Falling edge
Rising edge (PNP)
Inverted input signal.
Tach Off Level
0…23V
(in 1 V increments)
This is the voltage at which the module considers the tachometer sensor to be OFF for tachometer
speed calculation purposes.
The Tachometer Off Level must be less than the Tachometer On Level.
5V
Tach On Level
1…24V
(in 1 V increments)
This is the voltage at which the module considers the tachometer sensor to be ON for tachometer
speed calculation purposes.
The Tachometer On Level must be greater than the Tachometer Off Level.
11V