Yaskawa F7 to L1000A User Manual
Page 42
(Header Title) Application Note
Doc#: PL.L1000A.01 Copyright Yaskawa Electric America, Inc.
©2010 www.yaskawa.com September 9, 2010 42 of 57
Subject: Transition Guide
Product: L1000A
Document: PL.L1000A.01
Title: Product Transition Guide – F7 to L1000A
Product Transition Guide – F7 to L1000A
F7
L1000A
Parameter Name
Parameter
Default
Setting
Record
Parameter
Default
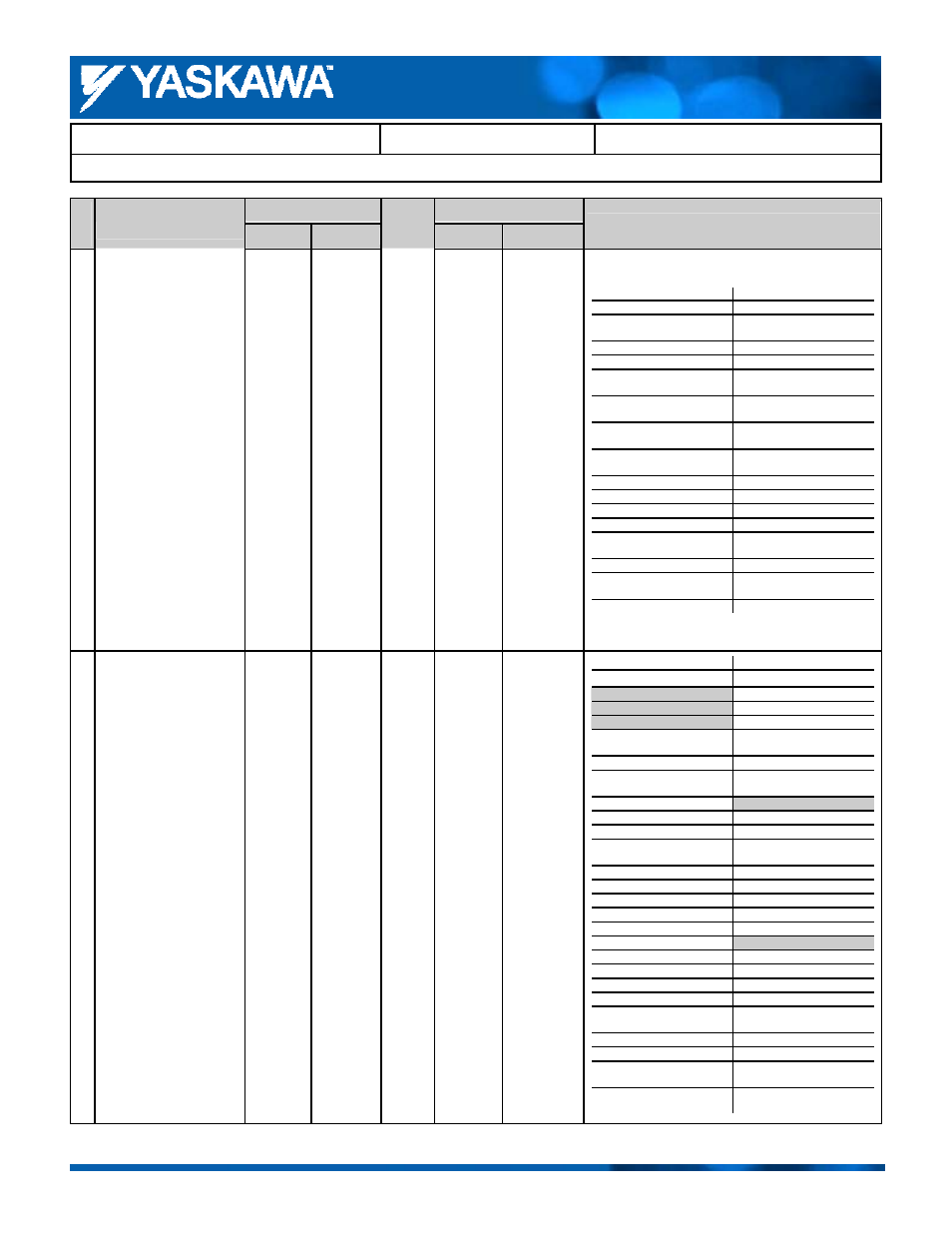
Comments:
Gray shading indicates default setting.
Digi
tal Inpu
ts
F7 L1000A
─
57: High Speed Limit(Up)
─
58: High Speed Limit
(Down)
─
5C: Floor Sensor
60: DC Braking command
─
61: External search
command 1
─
62: External search
command 2
─
63: Magnetic field
weakening
─
64: External search
command 3
─
65: KEB command (N.C.)
─
66: KEB command(N.O.)
─
67: Comm. test mode
67: Comm. test mode
68: High Slip Braking
─
71: Speed/Torque Control
switch
─
72: Zero Servo
─
77: ASR proportional gain
switch
─
─ 79:
Brake
Feedback
Digi
tal Outp
ut
s
Terminal M1 and M2 Function
Selection
H2-01 0 H2-01 50
F7 L1000A
H2-01 to H2-03
H2-01 to H2-05
0: During Run
0: During run
1: Zero Speed
1: Zero speed
2: Frequency Agree 1
2: Frequency agree 1
3: User-set frequency agree
1
3: User-set frequency agree
1
4: Frequency detection 1
4: Frequency detection 1
5: Frequency detection 2
(used when L4-07=1)
5: Frequency detection 2
(used when L4-07=1)
6: Drive ready
6: Drive ready
7: DC bus undervoltage
7: DC bus undervoltage
8: During baseblock
8: During baseblock (N.O.)
9: Freq ref selection
situation
9: Freq ref selection
situation
A: Run cmd situation
A: Run cmd situation
B: Torque detection 1 (N.O.) B: Torque detection 1 (N.O.)
C: Frequency reference loss
─
D: Braking resistor overheat
─
E: Fault
E: Fault
F: Not used
F: Through-mode
10: Alarm
10: Alarm
11: Fault reset
11: Fault reset
12: Timer function output
12: Timer function output
13: Frequency agree 2
13: Frequency agree 2
14: User-Set frequency
agree 2
14: User-Set frequency
agree 2
15: Frequency detection 3
15: Frequency detection 3
16: Frequency detection 4
16: Frequency detection 4
17: Torque detection 1
(N.C.)
─
18: Torque detection 2
(N.O.)
18: Torque detection 2
(N.O.)