Ground fault – Rockwell Automation MV SMC Flex Motor Controller (for Series K or later) User Manual
Page 22
12
Rockwell Automation Publication 1560E-UM051F-EN-P - June 2013
Chapter 1
Product Overview
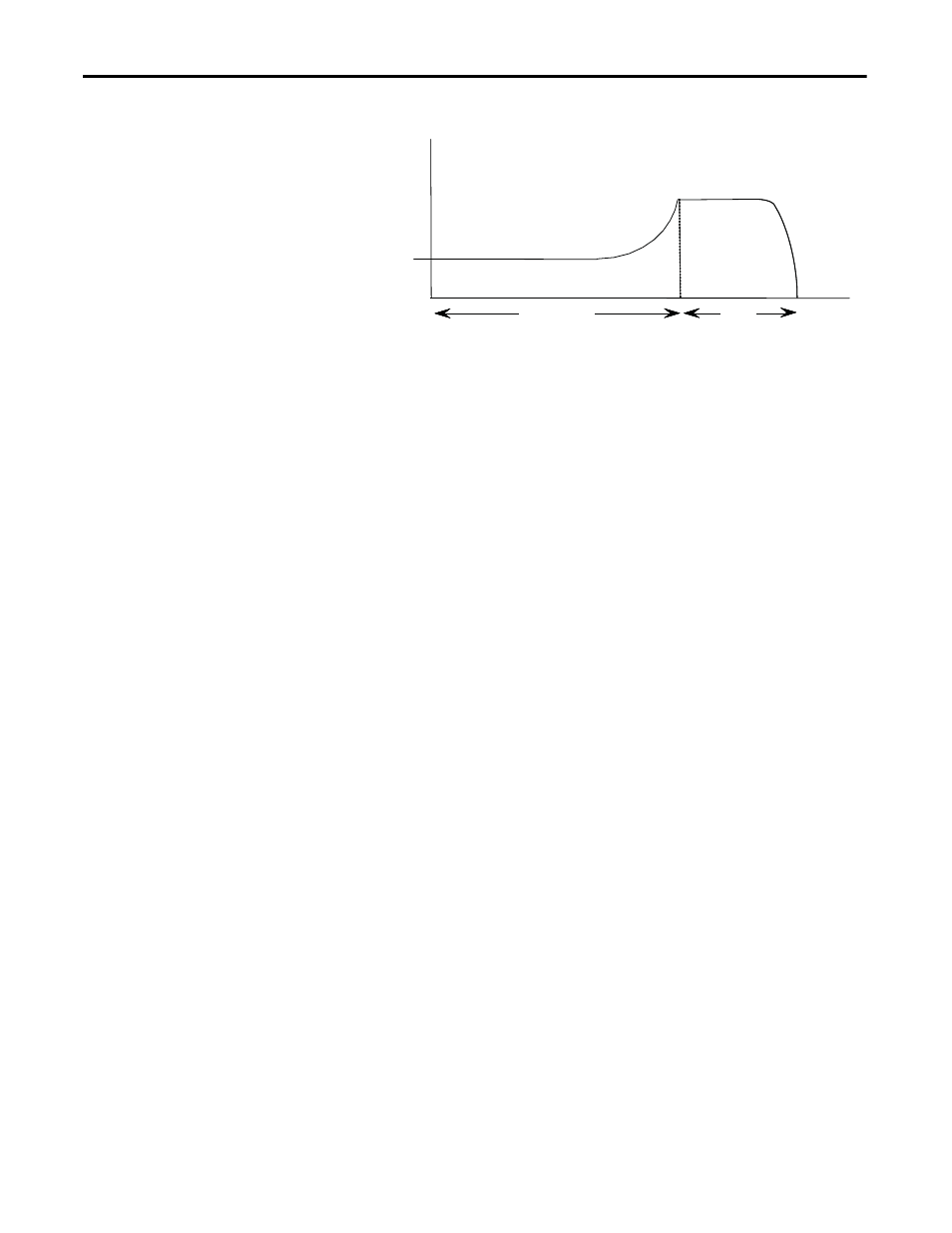
Figure 12 - Jam Detection
(7)
Ground Fault
In isolated or high impedance-grounded systems, core-balanced current sensors
are typically used to detect low level ground faults caused by insulation
breakdowns or entry of foreign objects. Detection of such ground faults can be
used to interrupt the system to prevent further damage, or to alert the
appropriate personnel to perform timely maintenance.
The MV SMC Flex’s ground fault detection capabilities consist of using a core
balance current transformer for 1 to 5A core-balanced ground fault protection
with the option of enabling Ground Fault Trip, Ground Fault Alarm, or both (a
core balance CT can be provided with 1562E units).
Ground Fault Trip
The MV SMC Flex will trip with a ground fault indication if:
•
No trip currently exists
•
Ground fault protection is enabled
•
GF Inhibit Time has expired
•
GF Current is equal to or greater than the GF Trip Level for a time period
greater than the
GF Trip Delay
Parameter 75,
Gnd Flt Inh Time, allows the installer to inhibit a ground fault trip
from occurring during the motor starting sequence and is adjustable from 0 to
250 seconds.
Parameter 74,
Gnd Flt Delay, allows the installer to define the time period a
ground fault condition must be present before a trip occurs. It is adjustable from
0.1 to 25 seconds.
Parameter 73,
Gnd Flt Level, allows the installer to define the ground fault
current at which the MV SMC Flex will trip. It is adjustable from 1.0 to 5.0 A.
(7) Jam Detection is disabled during slow speed and braking operation.
Percent
Full Load
Current
100%
Running
Jam
Time (seconds)