6 plc error, Plc error – NORD Drivesystems BU0550 User Manual
Page 91
4 Frequency inverter details
BU 0550 GB-0813
91
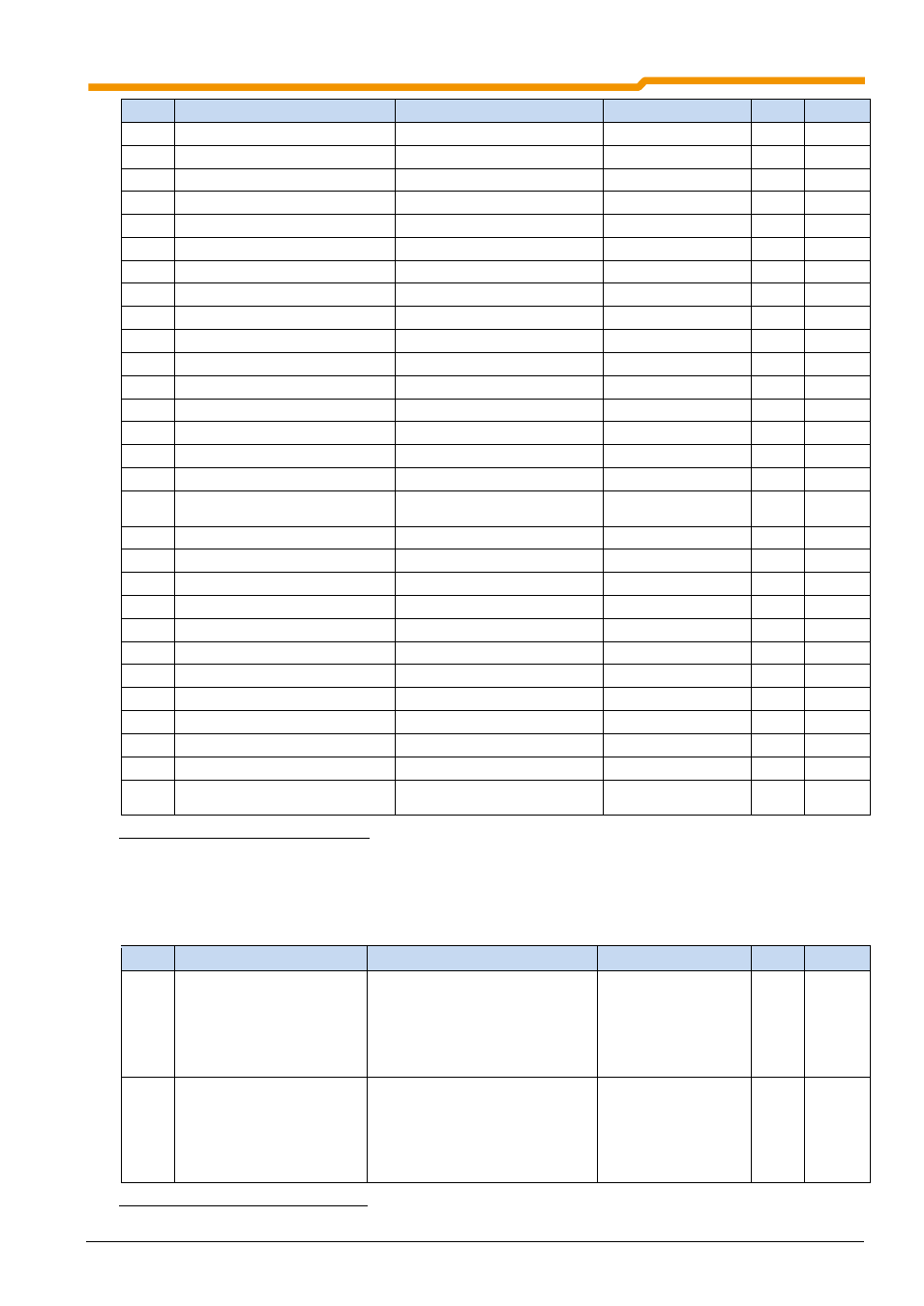
Index Name
Function
Standardisation
Type
Access
86
_86_Current_set_point_frequency2
Actual inverter setpoint frequency
10Hz = 100
INT
R
87
_87_Current_set_point_frequency3
Actual setpoint frequency after ramp
10Hz = 100
INT
R
88
_88_Current_Speed
Calculated actual speed
100rpm = 100
INT
R
89
_89_Actual_current
Actual output current
10.0A = 100
INT
R
90
_90_Actual_torque_current
Actual torque current
10.0A = 100
INT
R
91
_91_Current_voltage
Actual voltage
100V = 100
INT
R
92
_92_Dc_link_voltage
Actual link circuit voltage
100V = 100
INT
R
93
_93_Actual_field_current
Actual field current
10.0A = 100
INT
R
94
_94_Voltage_d
Actual voltage component d-axis
100V = 100
INT
R
95
_95_Voltage_q
Actual voltage component q-axis
100V = 100
INT
R
96
_96_Current_cos_phi
Actual Cos(phi)
0.80 = 80
BYTE
R
97
_97_Torque
Actual torque
100% = 100
INT
R
98
_98_Field
Actual field
100% = 100
BYTE
R
99
_99_Apparent_power
Actual apparent power
1.00KW = 100
INT
R
100
_100_Mechanical_power
Actual mechanical power
1.00KW = 100
INT
R
101
_101_Speed_encoder
Actual measured speed
100rpm = 100
INT
R
102
_102_Usage_rate_motor
Actual motor usage rate
(instantaneous value)
100% = 100
INT
R
103
_103_Usage_rate_motor_I2t
Actual motor usage rate I
2
t
100% = 100
INT
R
104
_104_Usage_rate_brake_resistor
Actual brake resistor usage rate
100% = 100
INT
R
105
_105_Head_sink_temp
Actual heat sink temperature
100°C = 100
INT
R
106
_106_Inside_temp
Actual inside temperature
100°C = 100
INT
R
107
_107_Motor_temp
Actual motor temperature
100°C = 100
INT
R
141
_141_Pos_Sensor_Inc
Position of incremental encoder
0.001 rotation
DINT
R
142
_142_Pos_Sensor_Abs
Position of absolute encoder
0.001 rotation
DINT
R
143
_143_Pos_Sensor_Uni
Position of universal encoder
0.001 rotation
DINT
R
144
_144_Pos_Sensor_HTL
Position of HTL encoder
0.001 rotation
DINT
R
145
_145_Actual_pos
Actual position
0.001 rotation
DINT
R
146
_146_Actual_ref_pos
Actual setpoint position
0.001 rotation
DINT
R
147
_147_Actual_pos_diff
Difference in position between
setpoint and actual value
0.001 rotation
DINT
R
Table 108 Process values for actual FI values
4.2.6
PLC error
Via the process value ErrorFlags the FI errors E23.0 to E24.7 can be set from the PLC program.
Index Name
Function
Standardisation
Type
Access
110
_110_ErrorFlags
Generates user error in FI
Bit 0:
E 23.0
Bit 1:
E 23.1
Bit 2:
E 23.2
Bit 3: E 23.3
Bit 4: E 23.4
Bit 5: E 23.5
Bit 6: E 23.6
Bit 7: E 23.7
BYTE R/W
111
_111_ErrorFlags_ext
Generates user error in FI
Bit 0:
E 24.0
Bit 1:
E 24.1
Bit 2:
E 24.2
Bit 3: E 24.3
Bit 4: E 24.4
Bit 5: E 24.5
Bit 6: E 24.6
Bit 7: E 24.7
BYTE
R/W
Table 109 Process value for User Error Flags