NORD Drivesystems BU0550 User Manual
Page 59
3 AWL (Instruction List, IL)
BU 0550 GB-0813
59
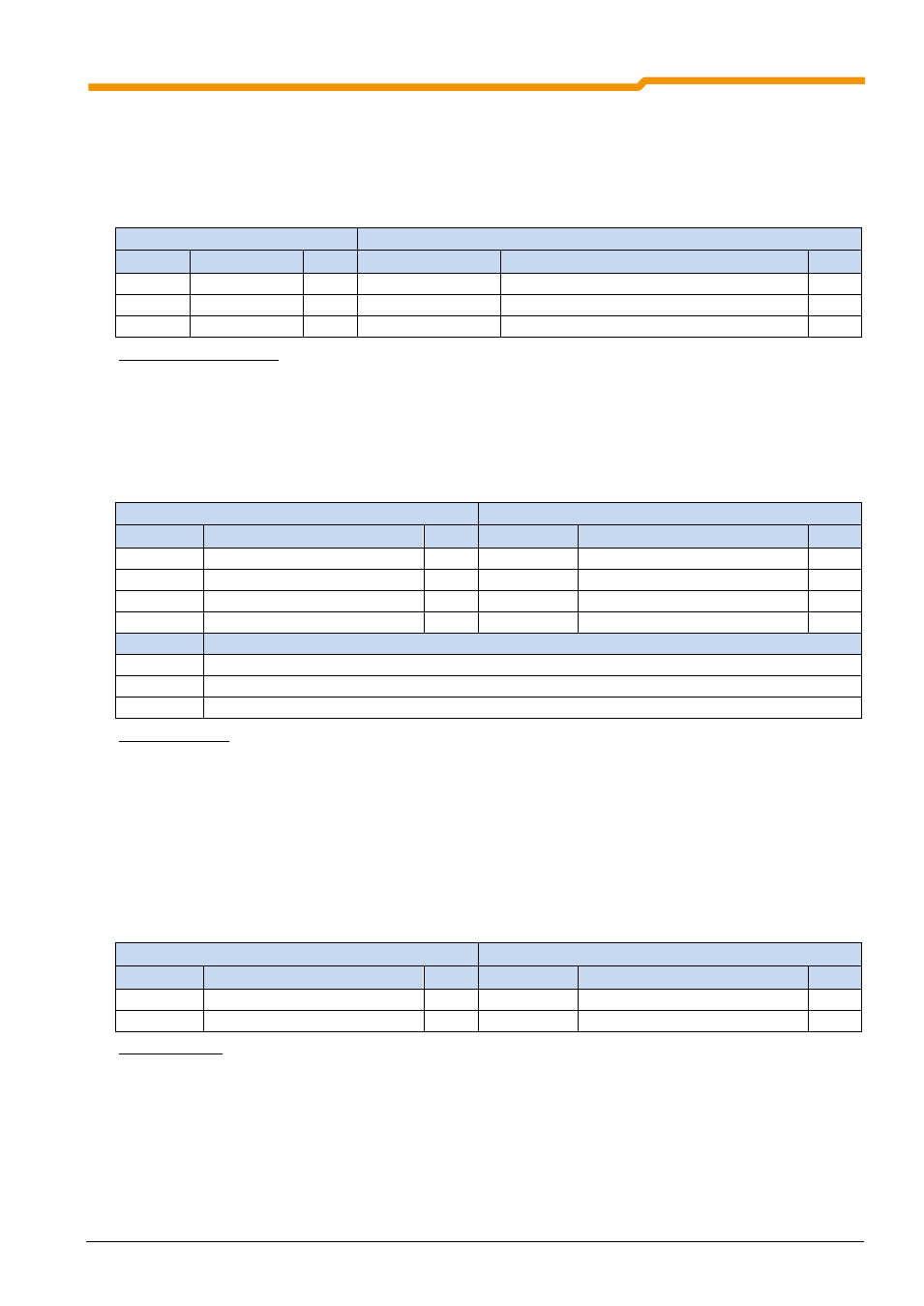
3.5.2.11 MC_ReadActualPos
Continually supplies the actual position of the frequency inverter if ENABLE is set to 1. As soon as a valid
actual position is present at the output, VALID is set to valid. In case of error, ERROR is set to 1 and in this
case VALID is 0.
Position scaling: 1 motor revolution = 1000
Table 82 MC:ReadActualPos
3.5.2.12 MC_Reset
Resets an error in the frequency inverter (error acknowledgement) with a rising flank from EXECUTE. In
case of error, ERROR is set to 1 and the cause of the error is entered in ERRORID. All errors are reset with
a negative flank on EXECUTE.
Table 83 MC_Reset
3.5.2.13 MC_Stop
With a rising flank (0 to 1) the frequency inverter is set to the status STANDINGSTILL. All currently active
Motion functions are aborted. The frequency inverter brakes to 0Hz and switches off the output stage. As
long as the Stop command is active (EXECUTE = 1), all other Motion Fbs are blocked. The BUSY output
becomes active with the rising flank on EXECUTE and remains active until there is a falling flank on
EXECUTE.
Table 84 MC_Stop
VAR_INPUT
VAR_OUTPUT
Input
Explanation
Type
Output
Explanation
Type
ENABLE
Enable
BOOL
VALID
Output is valid
BOOL
ERROR
Error in FB
BOOL
POSITION
Actual position of the FI
DINT
VAR_INPUT
VAR_OUTPUT
Input
Explanation
Type
Output
Explanation
Type
EXECUTE
Start
BOOL
DONE
FI error reset
BOOL
BUSY
Reset process is still active
BOOL
ERROR
Error in FB
BOOL
ERRORID
Error code
INT
ERRORID
Explanation
0
No error
1001h
Stop function is active
1700h
An error reset could not be performed, because the cause of the error is still present.
VAR_INPUT
VAR_OUTPUT
Input
Explanation
Type
Output
Explanation
Type
EXECUTE
Start
BOOL
DONE
Command has been executed
BOOL
BUSY
Command is active
BOOL