5 fb_pidt1, Fb_pidt1 – NORD Drivesystems BU0550 User Manual
Page 64
PLC logic for NORD SK 54xE frequency inverters
64
BU 0550 GB-0813
3.5.5
FB_PIDT1
The P-I-DT1 is a discrete controller which can be freely parameterised. If individual components or the P, I
or DT1 component are not required, their parameters are written as 0. The T1 component only functions
together with the D component. Therefore a PT1 controller cannot be parameterised. Due to internal
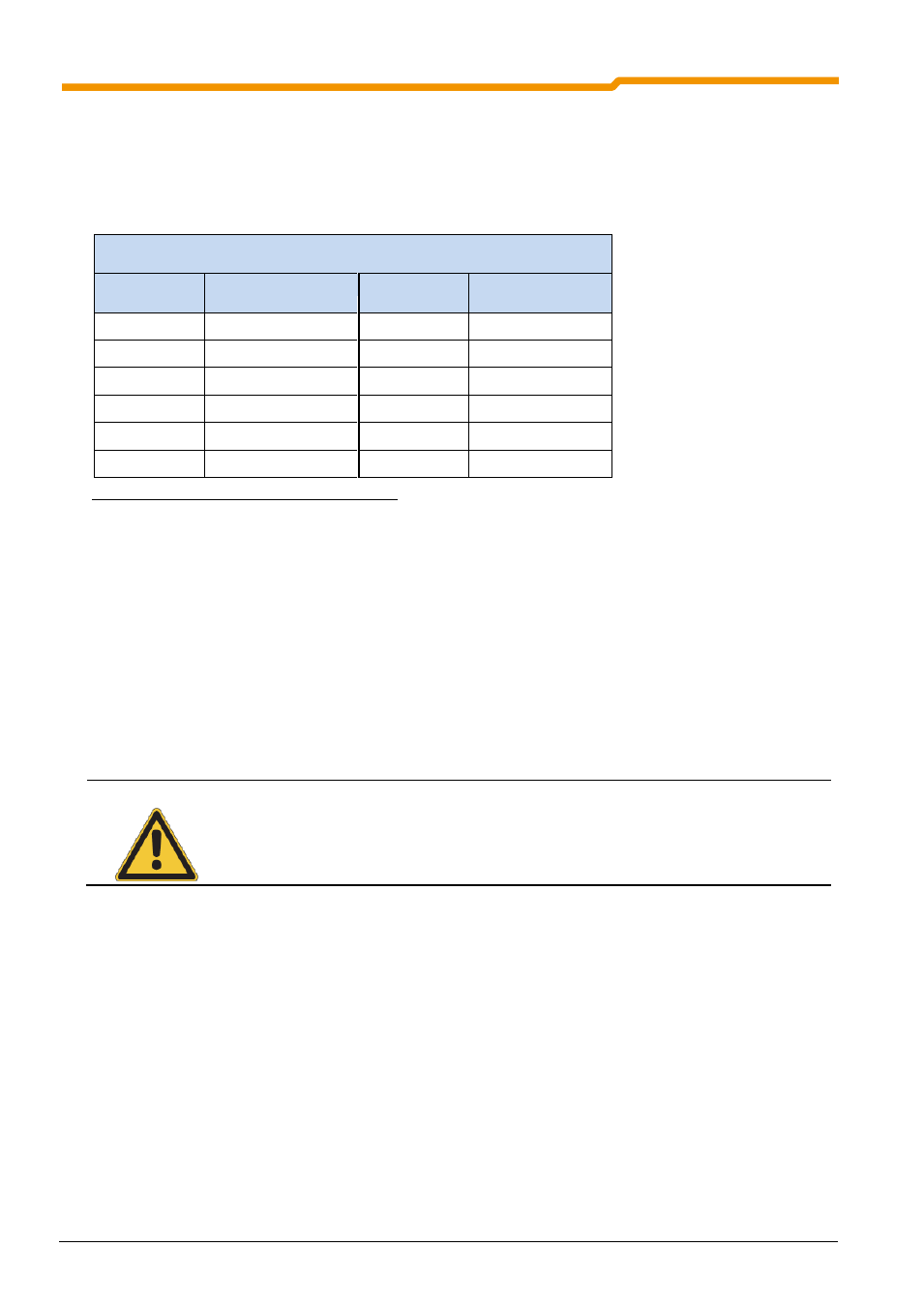
memory limitations, the control parameters are restricted to the following areas:
Permissible value range for
control parameters
Parameter
Value range
Scaling
Resulting value
range
P (Kp)
0
– 32767
1/100
0,00
– 32,767
I (Ki)
0
– 10240
1/100
0,00
– 10,240
D (Kd)
0
– 32767
1/1000
0,000
– 3,2767
T1 (ms)
0
– 32767
1/1000
0,000
– 3,2767
Max.
-32768
– 32767
Min.
-32768
– 32767
Table 90 Value range for FB_PIDT1 control parameters
If the ENABLE input is set to TRUE, the controller starts to calculate. The control parameters are only
adopted with a rising flank on ENABLE. Changes to the control parameters remain ineffective as long as
ENABLE is TRUE. The output remains at the last value if ENABLE is set to FALSE.
The output bit VALID is set as long as the output value Q remains within the minimum and maximum limits
and the ENABLE input is TRUE.
ERROR is set as soon as an error occurs. The VALID bit is then FALSE and the cause of the error can be
determined via ERRORID (see table below).
If the RESET bit is set to TRUE, the content of the integrator and the differentiator are set to 0. If the
ENABLE input is FALSE, the output OUTPUT is also set to 0. If the ENABLE input is set to TRUE, only the
P component acts on the output OUTPUT.
If the output value of OUTPUT exceeds the maximum or minimum output values, the appropriate bit
MAXLIMIT or MINLIMIT is set and the VALID bit is set to FALSE.
NOTE
If the entire program cannot be executed within a PLC cycle, the controller calculates the output
value a second time with the old scanning values. This ensures a constant scanning rate.
Because of this it is essential that the CAL command for the PIDT1 controller is executed in
each PLC cycle and only at the end of the PLC program.