7 program example – NORD Drivesystems BU0550 User Manual
Page 19
3 AWL (Instruction List, IL)
BU 0550 GB-0813
19
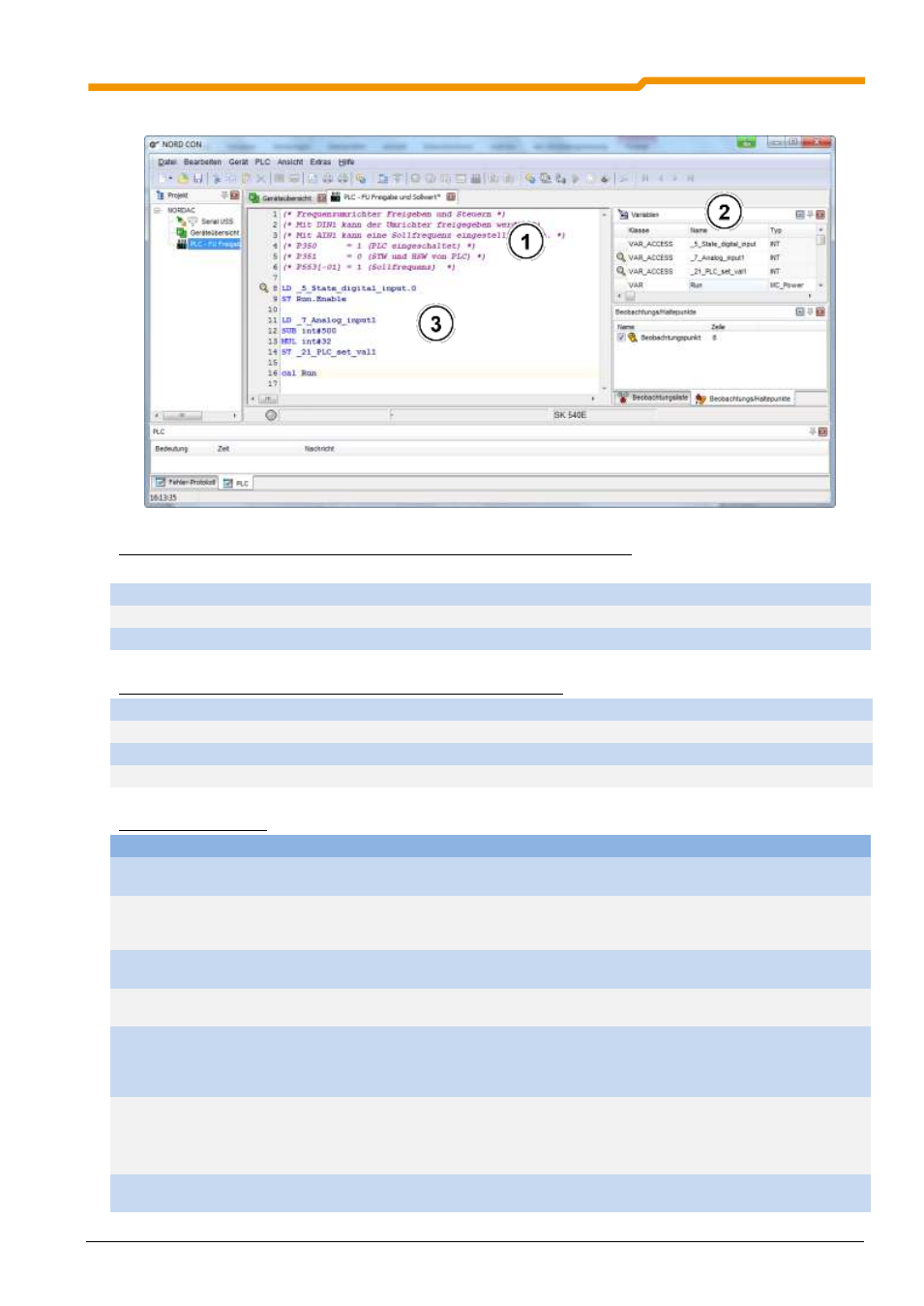
2.7 Program example
1. Comment to program function and the outline conditions for the program
e.g parameterise inverter for PLC control (the parameterisation must be carried out in the inverter.):
Parameter
P350
=
1
Control of the FI
via PLC
Parameter
P351
=
0
Control work and main setpoint
from the PLC
Parameter
P553[-01]
=
1
The
PLC setpoint 1
is defined as the
setpoint frequency
2. Definition of the variables and process values used in the PLC
_5_State_digital_input
Status of the digital inputs
_7_Analog_input1
Value of analog input 1
_21_PLC_set_val1
PLC
– setpoint 1
Run
Instance of the Motion Control module "MC_Power" (name freely selectable)
3. Program sequence
Command
Meaning
Example
LD
_5_State_digital_input
.0
Reads
the
status of the digital inputs
and loads the
value of
digital input 1
into the accumulator
Digital input 1: high Accumula-
tor = 1
ST
Run
.Enable
Saves
the value from the accumulator in the Mo-
tion Control block called up by the variable
Run
as
the value for
Enable
.
Enable = 1
LD
_7_Analog_input1
Reads
the value of
analog input 1
(Standardisation:
10 V = 1000) and loads it into the accumulator
AIn1 = 2.5 V accumulator = 250
SUB
int#500
Subtracts
the
integer value 500
from the accumu-
lator (shifts the 0-point from 0 to 5 V)
250 - 500 = Accumulator = - 250
MUL
int#32
Multiplies
the
integer value 32
with the accumula-
tor value ( Standardisation of the setpoint to the
value range of the FI (100 % = 4000
hex
≈
16000
dec
).
-250 * 32 = Accumulator = - 8000
dec
ST
_21_PLC_set_val1
Saves
the accumulator in the process variable
PLC-setpoint1
.
-8000
dec
setpoint - 50 %
(Setpoint 50 % of the maximum
frequency in the direction of rota-
tion to the left)
Cal
Run
The Motion Control function module for
setting the
output stage of the inverter
is executed
Output stage is enabled.